

Juba ostmise hetkel oli näha HK tootearvustustes ja välismaa foorumi postitustes mõningaid ohu märke. Ma vaatasin lennuvideot https://www.youtube.com/watch?v=0Zl-BNeseig ja kokkupaneku videosid https://www.youtube.com/watch?v=Zw047qdN4b8 ning kõik tundus suht lihtne ja loogiline. Võimalik et HK versiooni on natuke erinev, karbi ja komponentide peal on Art Techi kiri.
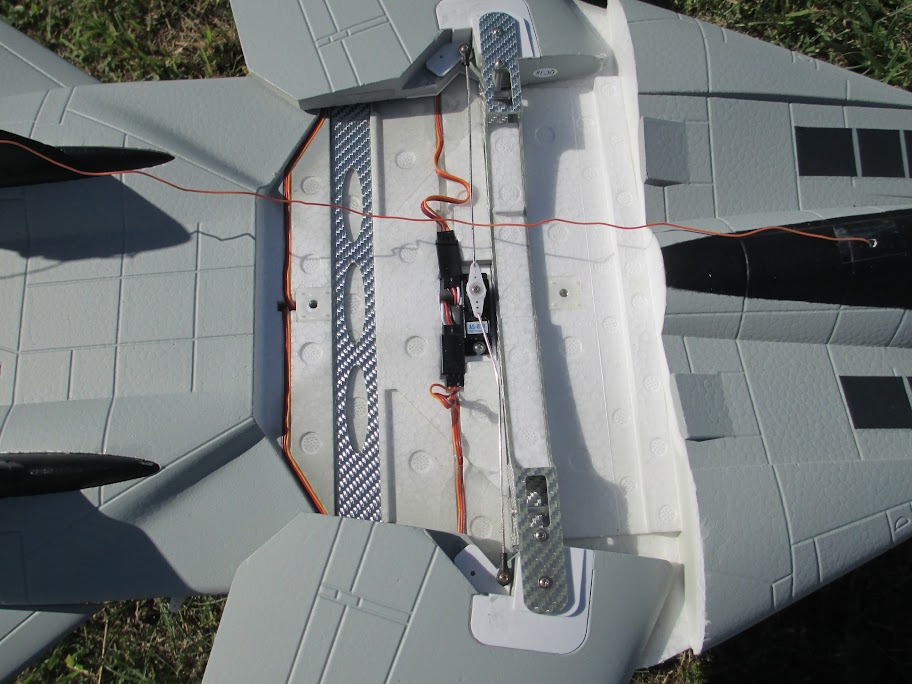
Esimene probleem tekkis servode töötamise kontrolli käigus. Kõrgustüür koosneb kahest poolest, millel on kummalgi oma servo. Need on omavahel ühendatud Y-kaabliga. Vastuvõtja sisselülitamisel liikus üks kõrgustüüri servo ühte asendisse ja ei reageerinud saatja käskudele. Probleemiks osutus servo pöörlemissuuna muutmiseks kasutatav elektrooniline vidin. Tänaseks tundub see olevat antud mudeli väga levinud probleem, vähemalt mingi perioodi väljalaskele. Viskasin selle vidina ja Y-kaabli mudelist välja ning ühendasin servo otse olemasoleva pikenduse külge. Muidugi tuli enne regulaatorite ja juhtmete kate eemaldada, mis sai natuke muljuda. Kaks sabaservot ühendasin seejärel eraldi kanalite alla ja määrasin neile V-saba miksi ehk siis saan kasutada sisuliselt taileron juhtpindu.
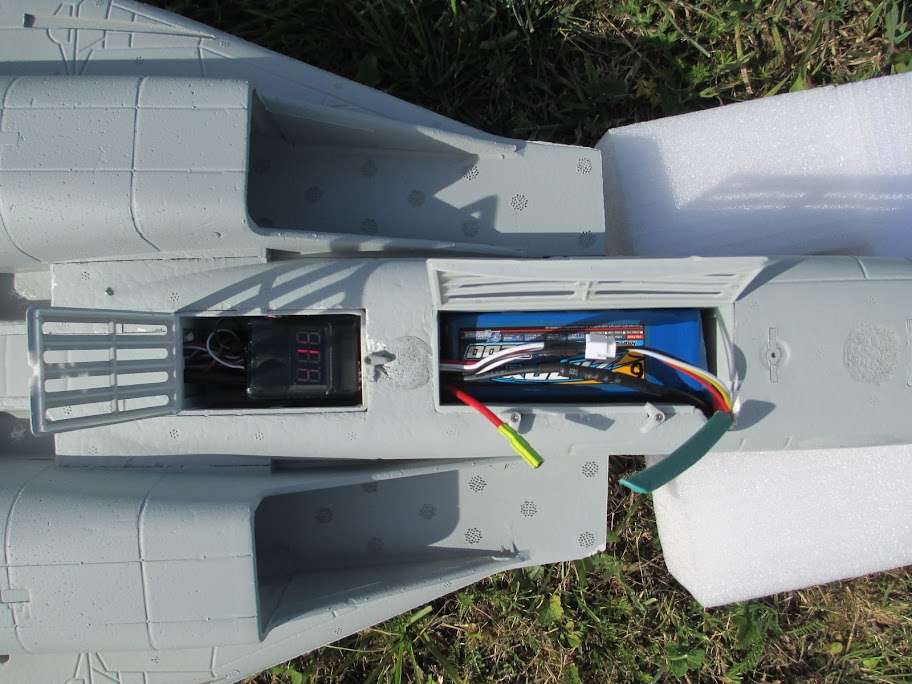
Järgmine probleem oli seoses akukarbiga, nimelt on see natuke väike Zippy ja Turnigy 3S 20C 2200mAh akude jaoks. Aku mahub, aga külje pealt väljuvate juhtmete jaoks ruumi pole. Lisaks varjab aku regulaatori poolsete juhtmete ava täielikult. Kiskusin karbi lennukist välja, õnneks tuli suhteliselt kergelt. Lõikasin ühe nurga maha, uuristasin väikese vao vahu sisse, regu juhtmete poolelt uuristasin ühte külge ja liimisin karbi tagasi. Pärast uute pistikute jootmist regulaatori juhtmete külge selgus, et aku ja regu juhtmed ei ulatu üksteiseni. Kuna servo pöörlemissuuna muutmise vidina eemaldamisest jäi natuke ruumi, õnnestus regulaatoreid väheke ettepoole nihutada. Nüüd saab juhtmed omavahel napilt ühendada.
Tiiva kinnitamisel kere külge on näha ühes ehitamise videos, kuidas tüüp lihtsalt peksab võlli alumise ava sisse. Ma uuristasin selle ava käsitsi 4mm puuri abil suuremaks. Läks väga hästi kokku.
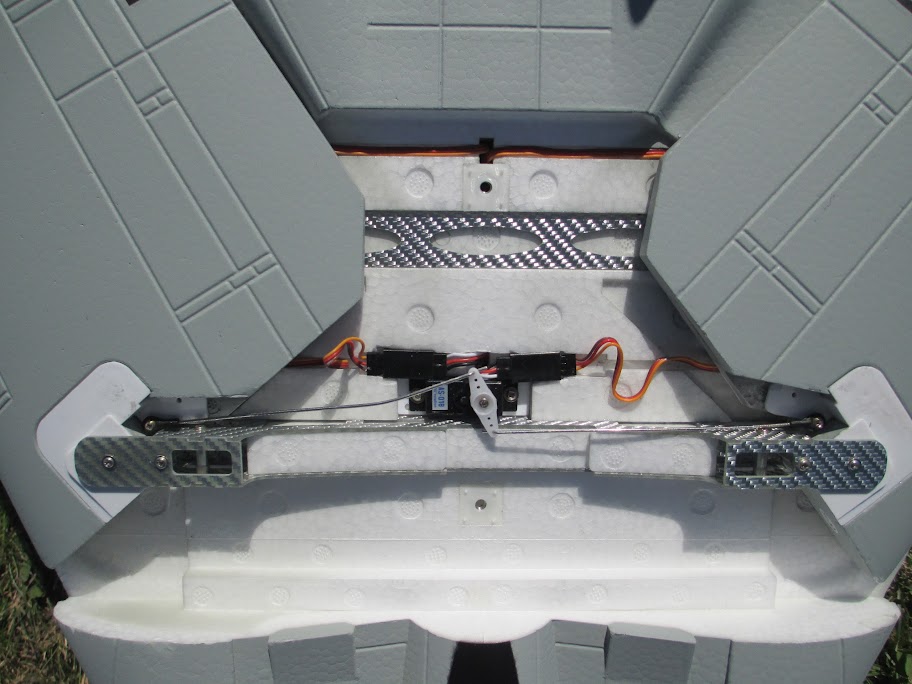
Kolmas suurem probleem on tiiva noolsuse muutmise süsteemiga. Sellele mul hetkel mingit lahendust pole, esmalennul jätsin tiivad välja ja ei julgenud lülitit puutuda. Esiteks olid komplektis sisalduvad tõukurid liiga lühikesed ja tiibu ei saanud pärislennukile sarnasesse väljasirutatud asendisse panna, väike noolsus jäi sisse. Hullem lugu järgneb. Kui tiivad väljasirutatud asendis välja joondada lähevad need tahapoole liikudes paigast ära ja vastupidi. Kui ühenduse geomeetriat vaadata jääb maksimaalse noolsuse asendis üks tõukur suurema nurga alla kui teine ja ma ei kujuta ette, kuidas see töötama peaks. Ometi tundub videotes süsteem toimivat. Üleüldse on kogu asi väga vedel. Maa peal proovimisel juhtus veel nii, et maksimaalse noolsuse asendist välja tuues jäi üks tiib korra kinni. Lennus seda küll ei tahaks.

Aerodünaamika poole pealt on tiibade, kiilude ja stabilisaatorite tagaservad ning õhukogujate esiservad sellel mudelil ca 4mm paksused. Võrdluseks on mõnel Multiplexi mudelil sabas asuvate pindade tagaservad ca 2mm ja tiibadel 3mm.
Staatiline jõuallika mõõtmine värskelt laetud 3S 2200mAh 20C akuga:
I: 32,38A max
U: 10,47V min
N: 356,5W max
Tõukejõudu on vähem kui kaalu. Lennukaal on minu mudelil 1096g.
Plaan oli teha see mudel käest visatavaks ja kõhule maanduvaks. Eemaldasin lennukilt teliku, ninaratta servo ja plastikust kabiini "sisustuse". Ninaratta servo avaus on hea koht tasakaalustamiseks kasutatavate raskuste mahutamiseks, aga asub ninast liiga kaugel, et olla ideaalne. Raskuskeskme asend on sellel mudelil antud ninaosast mõõdetuna ja seda on üpris keeruline märkida, eriti kui nina on karbist välja võttes natuke lömmis.
Nagu ennem öeldud oli esmalennuks motivatsioon suht maas ja eriti ei arvanud, et sellest mudelist asja saab. Stardil panin gaasi põhja, tegin ühe tugeva viske (enda kohta) ja siis hakkasid asjad juba ülesmäge liikuma. Tegelikult alguses allamäge, sest mudel oleks peaaegu ninaga maasse lennanud. Lennuk vajas kõvasti ülespoole kõrgustüüri ja trimmi. Kogu esimese lennu pidin kõrgustüüri natuke peal hoidma, sest trimm oli põhjas, aga viimast jäi ikka väheks. Alguses panin ninaossa 30g raskust, aga seda võtsin vähemaks. Raskuskeset ja tüüride käike veel päris paika ei saanud. Pärast kolmandat lendu tundus üks tiib natuke vetruv. Maandumised läksid kõik natuke pikaks ja niidetud muru asemel kõrgema rohu sisse. Eks sai mingi löögi ja noolsuse süsteemi üks tõukur paindus kõveraks.
Lennuomadustega jäin muidu rahule. Mudelit on lihtne käest visata, võimsust ja kiirust on minu jaoks piisavalt ning lennus näeb päris äge välja. Kui nüüd selle noolsuse muutmise mehhanismi tööle saaks, oleks mudel minu jaoks vaeva väärt.
Veel pilte: https://picasaweb.google.com/1048798391 ... edirect=1#

