Page 4 of 4
Posted: Fri Jul 18, 2014 9:33
by Riff
Induriga asi räägitud, varsti varsti saab proovida, kas vähendab häireid piisavalt.
Tellisin uue mootori ära, seekord 55T HPI, eelmine oli 15T HPI.

Selle mootoriga enam sõõrikuid ei tee, kuid see ei olegi eesmärk.
Posted: Tue Jul 29, 2014 9:52
by Riff
Ka minu plaati on tabanud 3,3V pingeregulaatori maha põlemine. Plaanis on maha põlenud jupp välja vahetada ning tuunida plaat paremaks, kasutajakindlaks.
Põhjuseks tundub olevat plaadi kasutajapoolse robustsuse puudumine, st ei tohi töötavale plaadile ühendada rx servokaableid jne... "hot-plug death"
Lihtsam mod:
http://www.rcgroups.com/forums/showthread.php?t=2124570
Kompaktsem mod, keerukam (lähen sellega edasi, jupid oomipoest tellitud):
http://www.rcgroups.com/forums/showthread.php?t=2152884
Posted: Thu Aug 14, 2014 23:21
by Riff
Keerukam mod tehtud, plaat töötab! Paras nikerdamine oli, õnneks laenas särts mikroskoopi ja väikese otsaga pintsette, nendeta ei oleks saanud tehtud.
5V ahelale on lisatud kondensaatorid, 3,3V muundurile on lisatud ka takisti, lühise/ülekoormuse korral lülitab nüüd lihtsalt välja ja ei põleta midagi maha.
Miks see häda alles nüüd tekkis oli seotud minu step by step katsetamisega. Katsetuseks eemaldasin ultraheliandurid, millel olid filtriteks kondekad, mis varasemalt olid plaati kaitsnud. Seega soovitan esimese asjana lisada + ja - klemmidele kondensaatori, kasvõi välise. NB! minul olid "analoog sisend" ja "väljund" + ja - rajad ühendatud väliselt.
Posted: Fri Aug 22, 2014 11:36
by Riff
Tähelepanek Mission Planner kohta:
Navigeerimisel olid justkui nihked sees, kui panna wp kaardi peale. Ma ei tea, kas see on MP pugi või Google kaardi pugi, aga kui suurendad veelgi rohkem sisse, maksimaalne võimlaik, siis kaart hüppab ~10m ning on õige.
Kas te olete sama viga märganud?
Posted: Fri Aug 22, 2014 20:40
by Riff


hmm
APM -> lennukile
pix -> roverile
Posted: Fri Aug 22, 2014 22:53
by Riff
Posted: Sat Aug 23, 2014 23:04
by Riff
Pixhawk ja sat kasutamine on omamoodi...
Et ühendada ja bindida sat on vaja eelnevalt sat ühendada tava vastuvõtja külge ning ära bindida, seejärel alles ühendad sat Pixhawk külge ning asi korras.
Pixhawk "safety switch" nupp on väga hea omadus. Kui tuluke vilgub, ei tööta mootor ega servod. Hoiad nuppu all, jääb tuluke põlema ning mootor ja servod töötavad.
Posted: Sat Aug 23, 2014 23:13
by Riff

Kaabeldus ja asjad tehtud, homme katsetama.
Posted: Mon Aug 25, 2014 10:09
by Riff
"Manual" ja "learning" funktsioon töötavad, "auto" reziim ei taha aga töötada korralikult, kui aktiveerida puldist.
Auto režiim aktiveeritakse, servo hakkab rattaid liigutama, kuid mootor ei aktiveeru.
Learning režiimis on näha, et suudab liikuri asukohta suhteliselt täpselt jäädvustada. Tulemusi saab hiljem vaadata MP Flight Plan aknast ning saab salvestada eraldi txt faili hilisemaks kasutuseks.
Panin teema DIYDrones vastava kategooria alla üles, ehk oskavad aidata viga lokaliseerida.
Infoks:
Mission Planner keskkonnas on, sarnaselt teistele vingematele süsteemidele, ära märgitud lennujaama asukohad ja lennukeelu alad.
Posted: Tue Aug 26, 2014 10:33
by Riff
Posted: Wed Aug 27, 2014 20:48
by Riff
Rover töötab kenasti, täidab käske. Nüüd edasi tuunima täpsemaks ja paremaks...

Posted: Thu Aug 28, 2014 10:37
by Riff
Uus AHRS ja EKF filter on väga vinge, varem sellist täpsust ei olnud.
Lühikokkuvõte teooria kohta:
http://www.gmat.unsw.edu.au/snap/public ... l2013a.pdf
Posted: Thu Aug 28, 2014 21:05
by Riff
GPS ja muude andurite kombinatsioon annab päris täpse tulemuse.
Siit saad aktiveerida AHRS_EKF_USE:
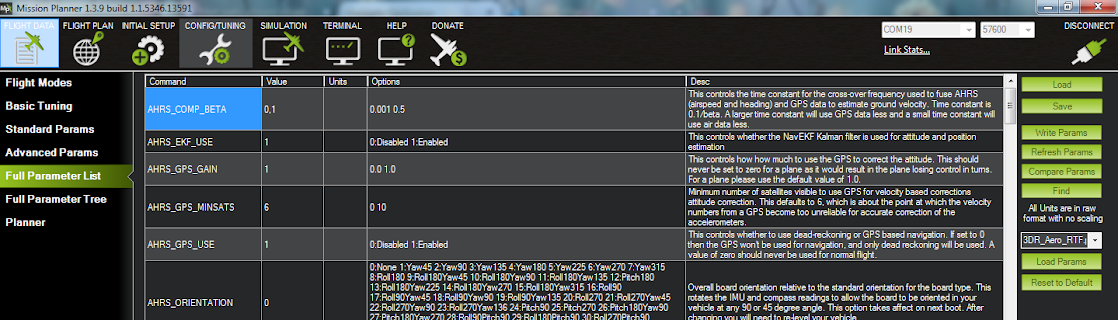
Korduvtäpsus avaramate kohtade juures on 0,4-0,5m, maja seina lähedal ~1m.
Hiljem aktiveerin ka teise GPS mooduli vaja teha ühenduskaabel. Lea 6H moodulil on nö vanemat tüüpi ots, Pixhawkil aga uuemat tüüpi, mõlemad DF13, erineva arv pinne.
Siit saab muuta MPU6000 töösagedust ja aktiveerida teise GPS mooduli:

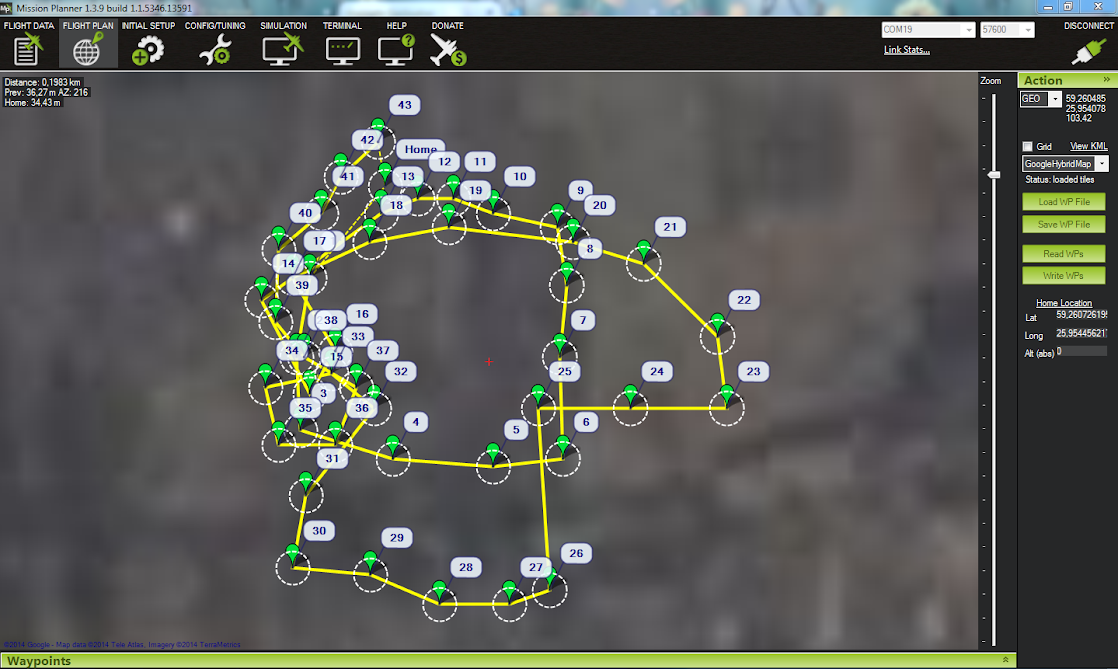
Sai tehtud mitu keerulist ringi suhteliselt kõrge muru peal, kus jääb läbitud rada hästi nähtavale. Kokku koosneb rada 43-st punktist.
Uus telemeetria moodul on Eestisse jõudnud, ehk saan juba homme kätte, siis saab järgmiseid asju katsetada. Tahaks väga teada, kas "follow me" funktsioon ka töötab.
NB! kui olete ka UGV Roverit ehitamas, siis ehitage robustne masin, mis kestab ka läbi põõsa sõitmist

. Kui oled wp valesti määranud või jätad vahele, siis läheb järgmise wp juurde ega arvesta teel olevate takistustega - ultraheliandurid peaksid selle mure kõrvaldama.
Plaanis on GPS moodul panna Al plaadi peale, mis võimaldab paremat robustsust.
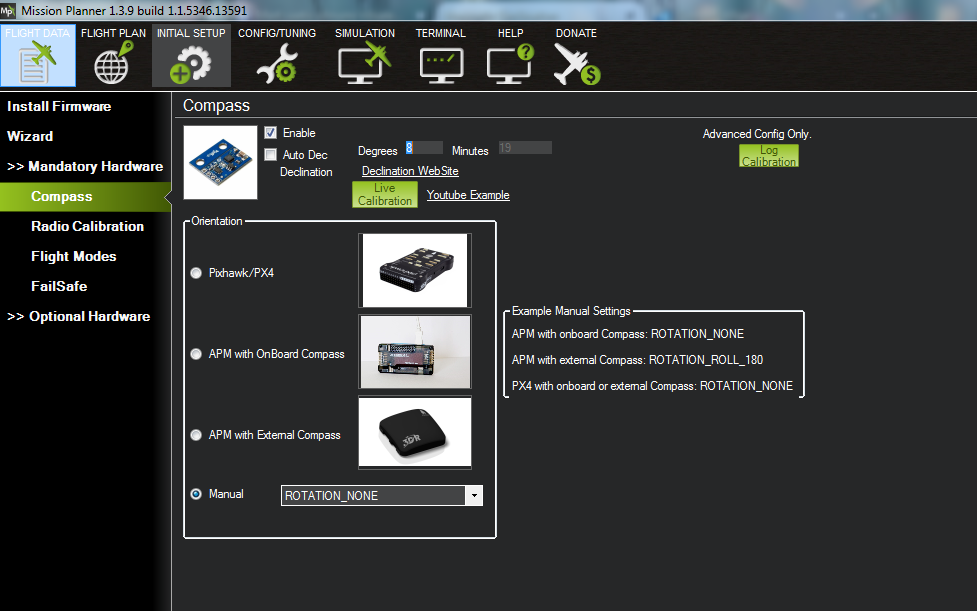
NB! kindlasti määrata manuaalselt "magnetic declination" magnetiline nihe. Täpsed andmed oma asukoha nihke kohta saad järgi vaadata siit:
http://magnetic-declination.com/
NB! vaikimisi kanalite mappimine ei sobi, see on vaja ära muuta. Servo läheb Pixhawk RC 1 külge ning ESC RC 2 külge. Kasutan Spektrum DSM2 sateliiti. Tavalise vastuvõtjaga on vaja kas toetatud bus tuge või PPM enkooderit kasutada.
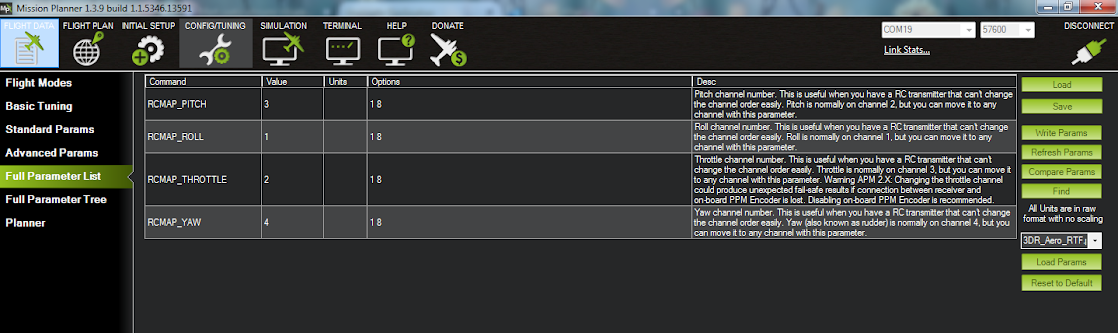
Puldist valida Acro reziim
Panin natuke seletavaid pilte juurde, kes seda teksti ikka viitsib nii palju lugeda
Posted: Sun Aug 31, 2014 11:41
by Riff
"Follow me" ehk järgne minule režiim töötab. Antud käsu puhul aktiveerib "Loiter" režiimi ning hakkab ringe tegema piloodi ümber.
Kuna mul ei ole andurid aktiveeritud, siis ega auto ei tea, kas midagi on ees või mitte...
Tulemuseks oli kergelt muda pritsmetega kaetud nägu. Auto pani üle peenra ning tegi ringe minu ümber kuni oli jõudnud minust teatud kauguseni, siis läheb uuesti "hold mode" peale ja ootab järgmist liikumist. Kergelt märg ilm, peenrad ning ringi käivad rattad - kui tõstad auto takistuse tagant ära ning rattad tahavad vabaneda tsentrifugaaljõu abil mudast ja sodist - võid seda juba ise ette kujutada

Posted: Mon Sep 01, 2014 10:26
by Riff
Vaikimisi on WP raadius 2m, soovitan rover puhul muuta 1m peale.
Posted: Mon Sep 22, 2014 23:14
by Riff
Alustasin ultraheliandurite seadistuse ja paigaldusega ning jõudsin järgmise takistuseni. Viimane Pixhawk firmware ArduRover 2.46 ei tööta korralikult, sonar funktsioonis on kala sees. Targemad tegelevad selle probleemiga.
Panin APM 2.5 peale vana softi ning sain vähemalt andureid katsetada. Eelmise koodi häda oli see, et tulemus oli küll olemas, kuid Mission Planneris oli tulemus ebastabiilne suuremate mõõtevahemike juures. Hakkasin teemat lähemalt uurima ning jõudsin huvitavatele järeldustele.
HC-SR04 stabiilne mõõtevahemik on Arduino IDE keskkonnas kuni 2,5m, mitte 4m nagu reklaamitakse. Peale konverteerimist kaotab andur veelgi täpsust ja stabiilsust, järgi jääb 1...1,5m, mis on praktikas kasutatavad.
Piirasin Arduino softis väljundsignaali 1m peale, MP keskkonnas näen aga kuni 1,5m ning skaala on õige.
Code: Select all
#include <NewPing.h>
#define SONAR_NUM 2
#define MAX_DISTANCE 250
#define PING_INTERVAL 30
unsigned long pingTimer[SONAR_NUM];
uint8_t currentSensor = 0;
NewPing sonar[SONAR_NUM] = { // trigger pin, echo pin, max distance
NewPing(5, 6, MAX_DISTANCE),
NewPing(7, 8, MAX_DISTANCE)
};
int pwmPins[SONAR_NUM] = {
10, 11 };
//int a;
void setup()
{
//Serial.begin(19200);
pingTimer[0] = millis() + 75;
for (uint8_t i = 1; i < SONAR_NUM; i++)
pingTimer[i] = pingTimer[i - 1] + PING_INTERVAL;
}
void loop()
{
for (uint8_t i = 0; i < SONAR_NUM; i++) {
if (millis() >= pingTimer[i]) {
pingTimer[i] += PING_INTERVAL * SONAR_NUM;
sonar[currentSensor].timer_stop();
currentSensor = i;
sonar[currentSensor].ping_timer(echoCheck);
}
}
// Other code that *DOESN'T* analyze ping results can go here.
}
void echoCheck()
{
if (sonar[currentSensor].check_timer())
pingResult(currentSensor, sonar[currentSensor].ping_result / US_ROUNDTRIP_CM);
}
void pingResult(uint8_t sensor, int cm)
{
int a = map(cm, 0, MAX_DISTANCE, 0, 255);
if (a > 100)
a = 100;
if (a <= 5)
a = 0;
analogWrite(pwmPins[sensor], a );
/*
Serial.print("Andur ");
Serial.print(sensor); // print sensor number accessed
Serial.print(" = "); // = märk
// see prindib reavahetuse ka lõppu, väljund hüppab järgmisele reale
Serial.print(a); // sensor distance value
// see prindib reavahetuse ka lõppu, väljund hüppab järgmisele reale
Serial.println(" cm "); // cm
*/
}
NB! Serial.print on hea debugimiseks, kuid annab häireid - seega eemaldada lõplikust koodist.
