Page 1 of 7
Tri-copter'i ehitus
Posted: Tue Dec 15, 2009 12:09
by -Ilmar-
Hei!
Hakkasin ehitama sarnast asja:
http://www.rcgroups.com/forums/showthread.php?t=959593
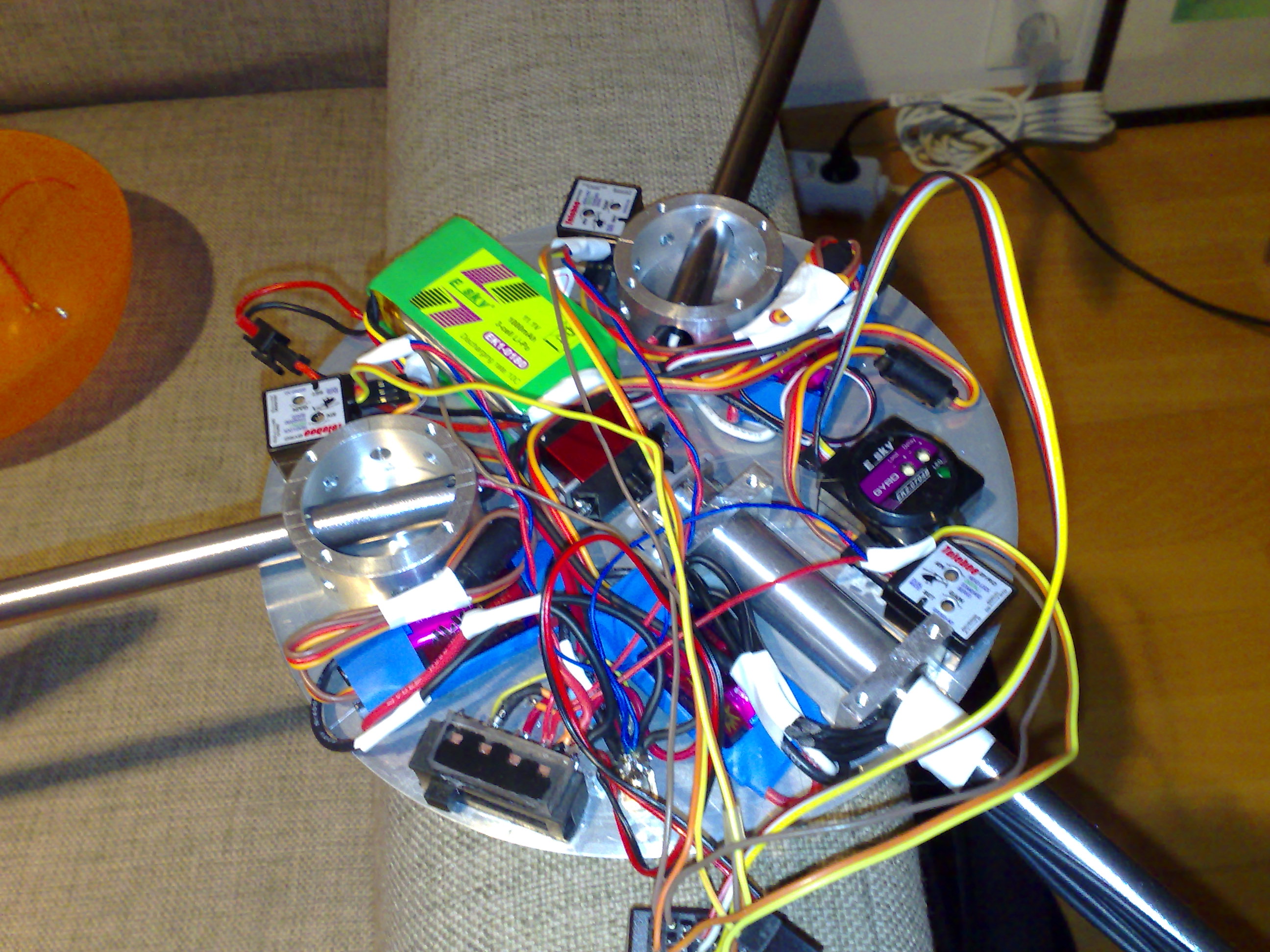
Kere on valmis, kere kaal ~272g, raadius 430mm:

Kokku pandud kujul:

Yaw kallutus, servoga:

Konstruktsioon:

Hetkel ootan jõuluvana pakki, elektroonika veel puudu...

Elektroonika osas teevad kaasa:
3tk. Telebee Head Lock & Standard Gyro -
http://www.hobbycity.com/hobbycity/stor ... al/Analog)
3tk. TowerPro BM2410-08T / 18A BEC / 1047 Prop Combo -
http://www.hobbycity.com/hobbycity/stor ... Prop_Combo
1tk. Yaw gyro, E-sky gyro
1tk. Yaw servo, HD-1810MG
Väike katluse uss närib ESC osas, ma ei lugenud teemat päris läbi enne kui tellimuse tegin... Seal soovitati "Hobbyking SS Series 18-20A ESC (card programmable)" kiiruse regut. Pidi olema parema resolutsiooniga. Eks näis.
Ma vaatasin, et kombos kõik olemas, tegin sellise valiku...
*LISA*
Lisan siia huvitavaid linke:
Shrediquette:
http://shrediquette.blogspot.com/
***
Micro Hexrotor:
http://www.rcgroups.com/forums/showthread.php?t=1054541
***
KapteinKUKs Simple and Low Part Count Quad, Hex and Tricopter Flight Controller:
http://www.rcgroups.com/forums/showthread.php?t=1143569
KapteinKUKs Tri-copterile aju olemas:
http://www.rcgroups.com/forums/showpost ... tcount=618
KapteinKUKi ajule WiiMotionPlus:
http://www.rcgroups.com/forums/showpost ... count=7235
http://www.rcgroups.com/forums/showpost ... count=7247
***
Tricopterile Flymentor:
http://www.rcgroups.com/forums/showpost ... count=7045
http://www.rcgroups.com/forums/showpost ... count=7069
***
TriWiiCopter:
http://www.rcgroups.com/forums/showthread.php?t=1261382
http://radio-commande.com/international ... ter-design
***
FYETECH FY-20A Version II - Inertial Measurement Unit (IMU) based Attitude Flight Stabilization
http://shop.fyetech.com/product_info.ph ... ucts_id=30
FYETECH FY90Q Dream Flyer - Quad kontroller:
http://shop.fyetech.com/product_info.ph ... ucts_id=41
***
T-kujulise tricopter'i ehituse reeglid:
http://www.rcgroups.com/forums/showthread.php?t=1309716
***
Erinevad ideed "TriCopter Yaw control setups":
http://www.rcgroups.com/forums/showthread.php?t=1308047
***
Parimat soovides,
-Ilmar-
Posted: Tue Dec 22, 2009 11:05
by -Ilmar-
Hei!
Jupid tulid King-kongist...
Mingi jama tekkis ühe güroga. Esialgu katsetasin kõiki gürosid servoga.
Ühe güroga, peale seda kui güro led põlema jääb, kangi liigutamisel servo ei liigu.
Kui jätan gain juhtme lahti, tean et läheb "HH mode", liigub ka servo nii kangist kui ka güro liigutamisel servo liigub.
Gain on puldist sama mis toimivatel gürodel.
Üks tähelepanek veel: Kui güro init ära toimub siis servo keskele ei visku, hüppab ühele poole.
Valmis lendama:

Parimat soovides,
-Ilmar-
Posted: Tue Dec 22, 2009 14:15
by hommiku kohvi
kõikse paremini illustreeriks vist seikse riistapuu lennuomadusi üks tore videoklipp
Tri-copter'i esimesed lennud
Posted: Tue Dec 22, 2009 20:56
by -Ilmar-
Hei!
Kes tahtis videot??? Aga palun:
http://www.youtube.com/watch?v=_KNVoDYVZis
Güro probleem oli selles, et talle ei meeldinud millegipärast Graupner'i R700 vastuvõtja. Õigemini teistele ka ei meeldinud.
Nüüd on mul ASSAN 6kanaliga vastuvõtja ja sellega toimib. Kahjuks on see HK450 oma... Eks ta on nüüd natuke ilma.
Nüüd peab puldi seaded näppima...
Parimat soovides,
-Ilmar-
Posted: Tue Dec 22, 2009 21:55
by titan
Aga tubli, igatahes!
Kuidas ta muidu juhitavuselt tundub, võrreldes RC kopteriga?
Sellega oleks vast algajatel odavam alustada. Kukkumisel tuleb asendada mõni propp ja taas lendu.
Posted: Wed Dec 23, 2009 9:09
by -Ilmar-
Hei!
Gürod on veel korralikult häälestamata. Oli esimene lend ja ruumi oli vähe, veidike ujus liiga palju. Võib-olla sellest et maakerale liiga lähedal, ground-effect??? Kõrgemele ei julgenud lasta... Ruumi tahab rohkem.
Üllatavalt stabiilne on, kui ujumine välja arvata. Belt-cp koos alu peaga seisis paremini. Aga tri-copteril oli tegelikult esmalend.
Kahju, et väljas proovida ei saa ...
Parimat soovides,
-Ilmar-
Posted: Fri Jan 15, 2010 11:48
by -Ilmar-
Hei!
Vajan veidi abi....
Koostan tri-copterile uut keret ja kasutan carbon fiber toru 11mm. Ülisuurt kaaluvõitu küll pole, eelmisega võrreldes ~70g. Konstruktsioon ja parandmine on lihtsam.
Tekki selline küsimus, kui pikad võivad olla juhtmed ESC ja mootori vahel?
Kasutaks 0.75mm2
Carbon toru oleks 370mm.
Parimat soovides,
-Ilmar-
Posted: Fri Jan 15, 2010 16:24
by inimene.
Muud tõesti ei oska õelda, kui tubli.
Posted: Fri Jan 15, 2010 16:26
by felch
Minu meelest muud piirangut polegi kui juhtme eritakistus ja sellest tekkiv piungelang. Pmst võib ju pika juhtme peale pöörlemise tagasiside signaal ka moonutuda aga eriti ei usuks.
Posted: Fri Jan 15, 2010 18:01
by aretaja
see mure võib tekkida mingi äkki mingi 5-10 meetri pikkuste juhtmetega.
Posted: Fri Jan 15, 2010 19:47
by mart63
Alalisvooluga oleks see nii, aga 3-faasilised mootorid teatavasti vahelduvvoolul, pikkadest mootori ja kiiruseregulaatori vahelistest juhtmetest tekkivatest probleemidest võib siit lugeda:
http://www.rcgroups.com/forums/showthread.php?t=952523
Posted: Sat Jan 16, 2010 0:58
by pipercub
Näiteks 1mm2 juhe. Lahtisele juhtmele on lubatud ~20A/mm2, silikoonisolatsiooniga rohkem. Takistus on ~17ohm/km. 1m jupil oleks pingelang 30A voolu korral U=IxR=30Ax(17/1000)=0,51V. Nii ESCi sisendis, kui väljundis on pidevalt voolu all 2 juhet ehk teiste sõnadega saab antud tingimustel käitada vooluallikast 0,5m kaugusel olevat mootorit. 3S LiPo puhul kaod ~6%. Induktiivkaod on varjestamata ja keerutatud juhtmetega väga väikesed. Peamine oht on häired, nende vastu aitab juhtmete keerutamine või punumine.
Mudelite "brushless" mootorid kuuluvad elektrotehniliselt väliselt kommuteeritud alalisvoolumootorite hulka. Nagu harjadega mootoril, on korraga voolu all 2 otsa 3-st. 3-lt otsalt saadakse tagasisidesignaal kommuteerimise ajastamiseks. Mootori võimsust reguleeritakse PWR (pulsi laiuse) meetodil. Ehk täpselt samamoodi, nagu harjadega mootori ESCis.
Teema algatajal on üle 8000 postituse.
Posted: Sat Jan 16, 2010 14:52
by -Ilmar-
Hei!
Oot oot, esimesed read mis mina lugesin:
Solution
Lengthen the motor wires, not the battery wires.
Kerin mootori juhtmed patsi ja topin carbon fiber torusse...
Tänan lingi eest, eks ma loen edasi, aga see jäi kohe silma.
Parimat soovides,
-Ilmar-
Posted: Sat Jan 16, 2010 21:35
by felch
-Ilmar- wrote:
Solution
Lengthen the motor wires, not the battery wires.
Loogish, aku juhtmetest läheb läbi kogu mudeli vool, mootori juhtmetest vaid tema vool. 3-kopteri puhul on aku vool 3* mootori vool pluss veel mingi pudi!
Raadiohäirete vastu aitab varjestamine: mootori juhtmed suka sisse, mis maandatud ESC-i plaadi külge (mootori poolelt lahti). Süsiniktoru võiks ka hea varje olla kui ta vaid maandatud on.
Posted: Sat Jan 16, 2010 23:31
by pipercub
Teema algatajal on üle 8000 postituse.
Püüdsin ennast poliitkorrektselt väljendada, aga vist ei õnnestunud.

Nii energeetiliselt kui häirete poolest on optimaalne teha toitejuhtmed max pikad ja mootorijuhtmed max lühikesed.
Toitejuhtmetes voolab alalisvool maksimaalse pinge juures. See tähendab, et kaod ja häired on minimaalsed.
Mootori poolel on "järsult" pulseeriv vool muutuval induktiivsel koormusel ja väiksemal pingel. Kaod ja koos sellega ka häired on kordades suuremad.
Pikkade ja "harali" olevate toitejuhtmete korral tõuseb kõrgsageduslik koormus ESCi silumiskondensaatoritel. Odav ja väikese varuga kondensaator võib rikneda. Vanasti kasutati tantaalkondensaatoreid, aga on nad kallid, rasked ja tundlikud ülepinge suhtes. Praegu on saadaval parandatud sagedusomadustega elektrolüüdid mõõduka hinnaga. Nende väljaotsimine kaupluse nomenklatuurist on tüütu tegevus, aga täiesti võimalik.
Paarikümne A voolude juures peaks piisama 1-5mkF keraamilisest kondensaatorist lisaks.
Omaette teema on mootorijuhtmete varjestamine. Tööstuses lähevad üle 10-25m pikkustel varjestatud kaablitel kaod liiga suureks. Sel juhul on üks variant, et langetatakse muundamissagedus mittekuuldavast alast 16-25kHz 2-4kHz peale. Need kaablid on spetsiaalselt sagedusmuunduritele disainitud.
Mudelite puhul ei tohiks kadude probleemi olla, mõõdud on liiga väikesed. Probleemiks võib saada küllaldase voolutaluvusega kaabli saamine, tööstuslikud on rasked, tuleb arvatavasti ise teha.
Lihtsam on kõigepealt ilma varjestuseta proovida.
Posted: Sun Jan 17, 2010 12:49
by felch
pipercub wrote:
Toitejuhtmetes voolab alalisvool maksimaalse pinge juures. See tähendab, et kaod ja häired on minimaalsed.
Mootori poolel on "järsult" pulseeriv vool muutuval induktiivsel koormusel ja väiksemal pingel. Kaod ja koos sellega ka häired on kordades suuremad.
See on õige aga kas paarikümne kHz juures on effekt ikka tõesti märgatav ja oluline ? Kui juhtmel oleks varje ümber, hakkaks tekkiv (minimaalne!) induktiivsus fronte sööma aga see on ju hea häirete seisukohast! Mida kõveram impulss, seda vähem harmoonikuid. Loomulikult mõjub "kõverdamine" tüürskeemile koormusena aga nagu ei usuks et paari meetrise juhtme ja nii madala sageduse puhul oluline.
Posted: Sun Jan 17, 2010 14:56
by pipercub
Mudelite puhul ei tohiks kadude probleemi olla, mõõdud on liiga väikesed.
Lihtsam on kõigepealt ilma varjestuseta proovida.
Transistorid töötavad lülitirezhiimis e. C-klassis. Mida kiirem sulgemine ja avamine, seda väiksemad kaod. Need lülitused vastavad oma kiiruselt sagedustele
kümnetes või sadades megahertsides. Igale lülitusele vastab teatud kindel energiakadu. Kui võimsuseregulaator töötab sagedusel 4kHz, siis on kaod suuruses X. Sagedusel 3x4kHz=12kHz on kaod 3X.
Regulaatori kaod on maksimaalsed poolel võimsusel ja minimaalsed täis- ning nullvõimsusel.
Kadusid mõjutab ka mootori pöörlemiskiirus. Pöörete kasvamisel kasvavad ka kommuteerimiskaod.
Kaod mootori juhtmetes toimuvad sarnaselt.
Mootor genereerib omakorda hulga erinevaid võnkumisi, mis segunevad kommutatsioonimüraga ja annavad kokku tugevaid raadiohäireid. Siin avaldub väljatransistorite eelis bipolaartransistorite ees. Tänu üliväiksele ja lineaarsele sisetakistusele tekib väga vähe müra.
Posted: Sun Jan 17, 2010 15:22
by Kristjan
BLDC mootorid on ka alalisvoolumootorid... see, et elektrivoolu kommuteerimine on elektoorooniline, on hoopis iseasi. Samasugune muutuva polaarsusega elektrivool on ka harjastega mootori mähistes, lihtsalt seal käib kommuteerimine mehaaniliselt. Muidugi jutt juhtmete pikkusest on sellele vaatamata õige

Posted: Tue Jan 19, 2010 10:18
by -Ilmar-
Hei!
Panen siia mõned uued pildid:

Yaw teistmoodi:

Mootori juhtmed carbon fiber torus:

Parimat soovides,
-Ilmar-
Posted: Thu Feb 04, 2010 20:11
by MPX-M
Tere !
Kas kaamera ka paned peale. FPV tri-kopter ei olnud plaanis ?
Posted: Sat Feb 06, 2010 21:30
by -Ilmar-
Hei!
TEHTUD!
http://www.youtube.com/watch?v=RpEcHMVgWwM
Esimese katse kohapealt võib ütelda, et stabiilne... Vahepeal võtab küll ujuma... Mõned kahtlased jõnksud olid ka sees...
Pean veel propid ära balanseerima. Ja see "groundeffect" on ikka olemas.
Kui tõusin voodi vahelt ikka üles, ütleme ~1m, siis muutus ka mootori/propi hääl vaiksemaks.
Ehk propid ei plärisenud ja siis ei pidanud enam kangiga vehkima. Oi tahaks juba õue selle elukaga

FPV lendamist selle elukaga olen kaalunud, enne tahaks saada õue ja näha mis seal teeb.
Vahepeal ma tegin ka video, kuidas tricopterit initaliseerida.
http://www.youtube.com/watch?v=M4c-lcq75To
PS!
Niipalju märkuseks, et see Corona vastuvõtja mökutab toite lülitamisel, et Telebee gyrod solvuvad ja ei hakka tööle.
Selleks lisasin gyrodele eraldi toite lüliti. Enne vastuvõtjale toide siis gürodele toide...
Näit. ASSAN 2.4Ghz vastuvõtjaga sellist probleemi pole.
Parimat soovides,
-Ilmar-
Posted: Sun Feb 07, 2010 11:38
by -Ilmar-
Hei!
Lisan siia, kui kellegile pakub huvi Graupner MX-12 puldi seaded:
Kanal
1 - kolme Gyro gain otsad, ja throttle curve on kõikides punktides 20% nagu aru saate on tricopteril virtuaalne swashplate, servode asemel gyrod/mootorid.
Throttle jääb nagu vabaks, mina kasutasin seda gain'i jaoks.
2 - parem mootor
3 - sabamootor
4- Yaw servo
5 - vaba, võiksin kasutada HH mode gyrot saba jaoks. Hetkel Yaw on tavaline rate gyro. Gyro gain potekas 100%
6 - vasak mootor.
Telebee gyrode ATV(servo puhul mõjutab see käigu pikkust) 100%
MX-12 puldi seaded
120 CCPM
AILE 40%
ELEV 40%
PIT 70%
D/R & EXP
AILE 30%
D/R 85%
ELEV 30%
D/R 85%
PITCH curve
NORM
0,INH,60,INH,100
HOLD(kui hold on sees siis kopter ei pane minema, kui peaks kangi puutuma)
0,0,0,0,0
Parimat soovides,
-Ilmar-
Posted: Wed Mar 24, 2010 16:04
by felch
Ilmarist inspireerituna hakkasin ka 3-koperit ehitama. Probleem tekkis PIT güroga - väljund kogu aeg põhjas. Asja uurides selgus, et need gürod ei seedi kui Gain kanali impulss tuleb VAREM kui põhipulss. Tavaliselt on vastupidi (Rudder -4, Gain - 5). Siin oli aileronil (1) ja Elevatoril (2) asi ok, kui pit sai signaali kanalist 6, gaini aga kanalist 5 (koos teistega). Aitas signaali võtmine kanalist 7 ja sellest 1ms pulsi formeerimine PIC prosega (nii sai kiiremini kui takisteid ja kondesid otsides).
Kellel vaja - koodi ja skeemi (ainult PIC12F683, rohkem juppe pole vaja) saab minult.
Nüüd saab masina sisse lülitada 1 lülitiga: kui gürod on initi teinud, lased gaasi nulli ja ESCid ruigavad rahulolevalt.
http://parsek.yf.ttu.ee/~felc/kopter1.jpg
http://parsek.yf.ttu.ee/~felc/kopter2.jpg
Posted: Wed Mar 24, 2010 16:46
by ussimuna
Posted: Fri Mar 26, 2010 23:00
by felch
Nii, 3-kopteri esmalend kestusega ca 2..3minutit sai teoks. Edasi tuli pidada tunnike vahet aku laadimiseks (1A/h E-sky juust). Masin vajab veel häälestamist (piloot kah
) aga annab lootust.
http://parsek.yf.ttu.ee/~felc/3kopter.jpg
Tänud Ilmarile inspiratsiooni ja asjalike nõuannete eest ja kolleeg Toomasele rauatööde eest. Kogu treimine/klopsimine/viilimine/hööveldamine on tema tehtud. Mina vaid tinutasin, progesin ja lendasin...
Posted: Sat Mar 27, 2010 12:40
by -Ilmar-
Hei!
Väga lahe, ootan põnevusega videot!
Üks asi veel, maakerast peab võimalikult eemale hoidma, anna talle ruumi kah!
Madalal on propi hääl ka rohkem plärisev kui 50cm kõrgemal. Kõrgemal propid mõnusalt sahisevad, stabiilsem. Sa üllatud kuidas hääl muutub kui saad kõrgemale.
Muidugi hirm on sees, kuidas kõrgemalt kiiresti alla tuua, ruumi juurde!
Parimat soovides,
-Ilmar-
Posted: Sat Mar 27, 2010 21:54
by felch
Tekkis mõte nihutada mootorid poole telje peale. Siis jääks ülejäänud telg omamoodi kaitseks ja treeningtelikuks. Proovisin - erilist vahet lennuomadustes ei märganud aga ... siis sai jälle aku tühjaks

Mida arvatakse - kas mõte on millegi poolest sobimatu ?
PS. Mõtlesin midagi säärast:
http://parsek.yf.ttu.ee/~felc/DSCN0243.JPG
Posted: Sun Mar 28, 2010 13:11
by -Ilmar-
Hei!
Kõik oleneb asjaoludest, kui väikseks saab kopteri raadiuse ajada. Treeningteliku idee on hea.
Laiem on rohkem stabiilsem ja sobib pildistamiseks/filmimiseks.
Kuigi "Signguy" RCgroups foorumist:
http://www.rcgroups.com/forums/showpost ... count=3040 tegi 12inch ~30cm raadiusega kopteri.
Minul on praegu ~36cm ja kasutan Telebee gyro, Hobbyking SS Series 18-20A ESC (card programmable) ESC,
TowerPro Brushless Outrunner 2410-08T 890kv mootorid, 10x47 propid.
Samas tahaks juba õue selle elukaga, toas on ikka liiga kitsas, et käed vabalt katsetada
Praeguse seisuga veidi ikka pendeldab vajab puldi peal pöidlatööd.
Viimati avastasin, et ühel mootoril on veidike võll kõver, ootan uut mootorit. Vahepeal tundus juba, et võin käed lahti lasta, see kõver võll keerab praegu mäkra mulle...
Foorumis soovitatakse 2410-09 mootorit 840kv
või siis 2213N 800Kv
või siis DT750 750Kv
Gyrode kohalt pidi uus tegija olema: Hobby King 401B AVCS Digital Head Lock Gyro
PS. Propid soovitatakse kah ära balanseerida... Just dünaamiline balanseerimine. Lased mootori käima, hoiad kinni ja tunnetad vibratsiooni, lisad ühele labale klepsu ja lased uuesti mootori käima.
Kui läks hullemaks, paned klepsu teisele poole jne. Eks see üks tundeküsimus ole. Hetkel pole ise nii teinud, pole õiget tunnet tekkinud
Parimat soovides,
-Ilmar-
Posted: Tue Mar 30, 2010 21:29
by felch
Nii, natuke ta siis lendab ka:
http://parsek.yf.ttu.ee/~felc/00060.avi
Nagu näha, tekib saba liputamise effekt kuid seda püstsuunas. Kõigub. Mootorite heli järgi on ka kuulda.
Jääb mulje, et enne ümberehitamist lendas veidi paremini. Muudatused:
- gürod äärest keskele kokku
- raadius väiksemaks
Kogemata sai peale ringitegemist gürode suund vale ja esimese hooga keeras masin end kohe kummuli. 1 propp läks. Sabaservo hammaks kah. Asendasin propi Kullost leitud samas mõõdus asjandusega. Paistab, et ta päris sama siiski ei ole.
Digiservo HXT900 asendasin ajutiselt mingi analoogservoga. Saba hakkas võdisema. Ilmar seletas, et servo on nõrk. Aga...ta võdiseb ka niisama paigal seistes (ajuti) ja käega keerates liigub saba kergelt. OK, lennus on asi ilmselt teine.
Mida peaks tegema, et vidinat stabiilseks saada?
PS. Video on lühike kuna trial konverter ei soosutunud rohkem konvertima - enne maksa...
PS1. Unustasin - gürode gain otsad on veetud kokku ja PICi peale, mis tekiab neile min. kestusega pulsi (1ms). Potekad gürodel on min. asendis.
Milllest see pagana võnkumine ikkagi tekib? Konstruktsioon vedel?
Kena oranži "korpuse" võtsin ära, paistab, et tegi lendu stabiilsemaks.
Hakkasin veel mõtlema et kopter põsib paigal. kui teda veidi vasakule viltu hoida. Aga siis püsib ka vasak pool madalamal. Ehk on see seotud asendatud propi vähesema veovõimega? Pöörlemise kompenseerimiseks hhioab ta end rohkem viltu ja seega sunnib ka masinat paremale liikuma. Selle kompenseerimiseks kallutan. Ehh, tuleks propid rutem kohale...
Posted: Wed Mar 31, 2010 9:06
by -Ilmar-
Hei!
Gürodel see ATV pote on Sul ikka maksimum?? see on käigu pikkus see ei tohi olla minimum, pane maksimum ja tee throttle range uuesti kui see oli minimum. Pane servo gürole otsa ja vaata mida ATV minimum teeb, siis liigub servo nii vähe Sul on vaja täis käigupikkust!
See üles, alla võnkumine, seda tegid(tundus) kõik mootorid, Sul on gyrode gain liiga põhjas. Nagu Sa ütlesid 1ms. See võib tähendada, et max gain.
servo pulse keskel peaks olema gain minimum, ja 1ms siis maksimum. Teisele poole siis HH gain. 2ms HH minimum, Nii vist asi oli. Kopterimehed ehk kinnitavad.
See et saba seistes võidiseb, oli minul tingitud sellest kui kasutasin HXT900 servot. Vaata milline õlg tekib, nimelt mootorit hoitakse otsast(alt) edasi tuleb mootor ja otsas veel prop. Kui see kõikuma hakkab siis servo üritab oma potekaga asendit ju säilitada ja kui ta ei jõua hoida siis värisebki. See on minu arvamus.
Sul on üks prop teistest erinev? ikka 10x4.7?
Üldiselt kaldu pidi kopter hoidma selle pärast ka, et kõik propid käivad ühes suunas.
Ma tegin nii, et kallutasin veidi esimesi mootoreid samas suunas kui saba, siis on sabal kergem.(mitte palju, kraade ei oska ütelda). Nii peaksid esimootorid ka pöörlemisele vastu hoidma.
-Ilmar-
{kind=link}
{kind=link}
{kind=link}
{kind=link}