
Hakkasin ehitama sarnast asja:
http://www.rcgroups.com/forums/showthread.php?t=959593
Kere on valmis, kere kaal ~272g, raadius 430mm:

Kokku pandud kujul:

Yaw kallutus, servoga:

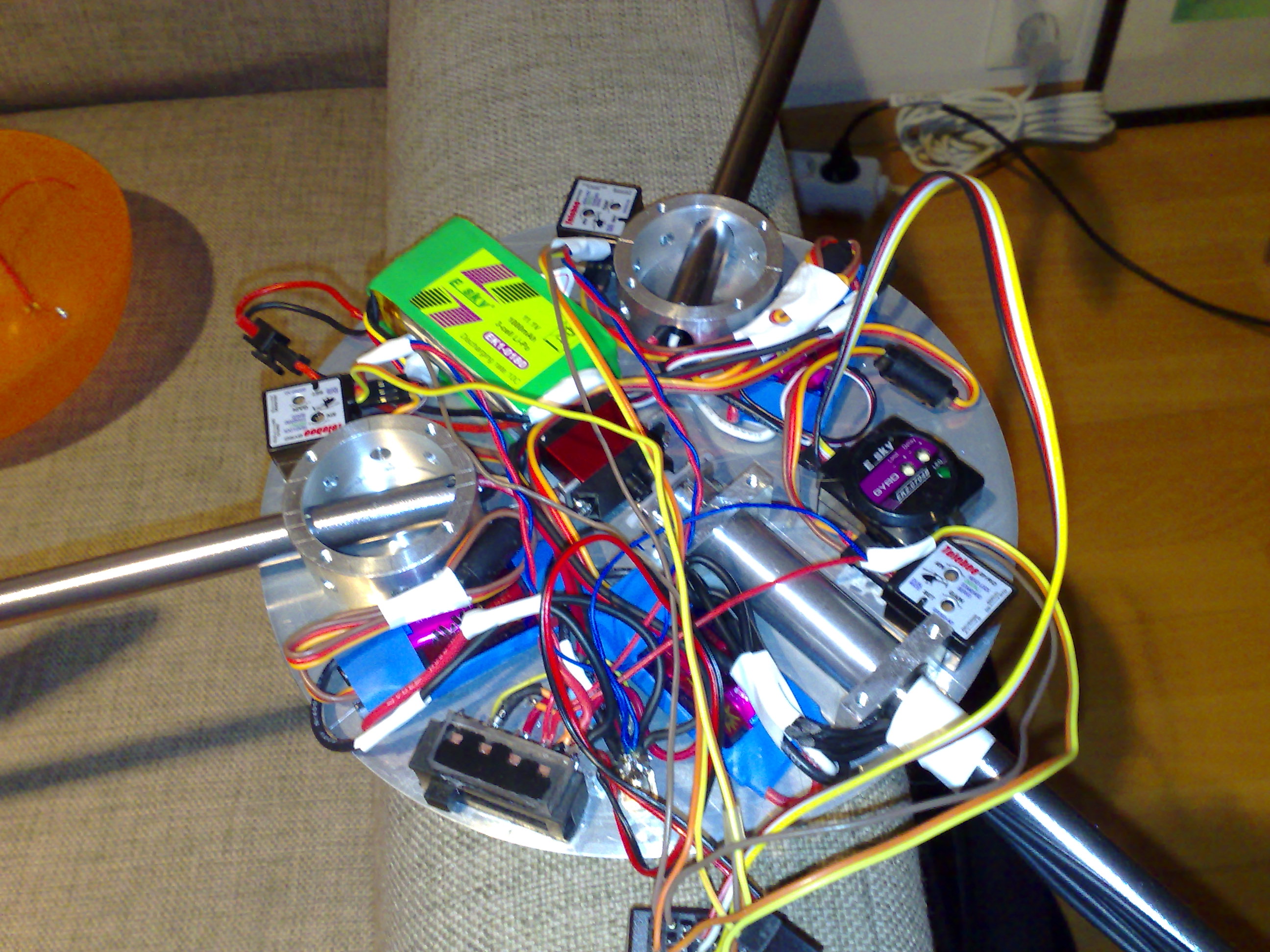
Konstruktsioon:

Hetkel ootan jõuluvana pakki, elektroonika veel puudu...
Elektroonika osas teevad kaasa:
3tk. Telebee Head Lock & Standard Gyro -
http://www.hobbycity.com/hobbycity/stor ... al/Analog)
3tk. TowerPro BM2410-08T / 18A BEC / 1047 Prop Combo -
http://www.hobbycity.com/hobbycity/stor ... Prop_Combo
1tk. Yaw gyro, E-sky gyro
1tk. Yaw servo, HD-1810MG
Väike katluse uss närib ESC osas, ma ei lugenud teemat päris läbi enne kui tellimuse tegin... Seal soovitati "Hobbyking SS Series 18-20A ESC (card programmable)" kiiruse regut. Pidi olema parema resolutsiooniga. Eks näis.
Ma vaatasin, et kombos kõik olemas, tegin sellise valiku...
*LISA*
Lisan siia huvitavaid linke:
Shrediquette:
http://shrediquette.blogspot.com/
***
Micro Hexrotor:
http://www.rcgroups.com/forums/showthread.php?t=1054541
***
KapteinKUKs Simple and Low Part Count Quad, Hex and Tricopter Flight Controller:
http://www.rcgroups.com/forums/showthread.php?t=1143569
KapteinKUKs Tri-copterile aju olemas:
http://www.rcgroups.com/forums/showpost ... tcount=618
KapteinKUKi ajule WiiMotionPlus:
http://www.rcgroups.com/forums/showpost ... count=7235
http://www.rcgroups.com/forums/showpost ... count=7247
***
Tricopterile Flymentor:
http://www.rcgroups.com/forums/showpost ... count=7045
http://www.rcgroups.com/forums/showpost ... count=7069
***
TriWiiCopter:
http://www.rcgroups.com/forums/showthread.php?t=1261382
http://radio-commande.com/international ... ter-design
***
FYETECH FY-20A Version II - Inertial Measurement Unit (IMU) based Attitude Flight Stabilization
http://shop.fyetech.com/product_info.ph ... ucts_id=30
FYETECH FY90Q Dream Flyer - Quad kontroller:
http://shop.fyetech.com/product_info.ph ... ucts_id=41
***
T-kujulise tricopter'i ehituse reeglid:
http://www.rcgroups.com/forums/showthread.php?t=1309716
***
Erinevad ideed "TriCopter Yaw control setups":
http://www.rcgroups.com/forums/showthread.php?t=1308047
***
Parimat soovides,
-Ilmar-








{kind=link}
{kind=link}
{kind=link}
{kind=link}