Raske mooblat suudistada, sest kui see on tosi, siis peab sellest rohkem ulemaailma raagitud. Aga selliseid teateid on vaga harva kuulda.
Multicopterite foorumites on tihti lugeda seda, et 35/72Mhz susteemid tihti tekkitavad probleeme juhtimisel. Seega, tundub hakkab 2.4Ghz multicopterites standardiks olla.
Pavel.
Tri-copter'i ehitus
Moderator: Kristjan
Mobla vestles just sel hetkel täisvõimsusel (ca 2W) mastiga. Muidu ta ei sega. Aga on võimalik, et viga oli milleski muus. Igatahes enam pole häireid esinenud. Mine võta kinni. Peab vist tõesti ilma proppideta katsetama hakkama.
Mobla häireid on aga igaüks kuulnud, kui läheduses raadio, telekas, arvuti kõlarid vms. Nii kui helistatakse, hakkab virin kõlarites pihta. sama virin vastuvõtjas tekitabki jamasid.
Mobla häireid on aga igaüks kuulnud, kui läheduses raadio, telekas, arvuti kõlarid vms. Nii kui helistatakse, hakkab virin kõlarites pihta. sama virin vastuvõtjas tekitabki jamasid.
Pole midagi paremat halvast ilmast !
Häire tekib nii, et võigas suure amplituudiga signaal sattudes pooljuhi sisendile lõigatakse otsast kandiliseks (küllastuspinge ju umbes 0,7V). Kandiline signaal koosneb aga kõikide sageduste harmoonilistest ja häiret on seadmes nii, et "tapab". See on kõige tavalisem häire tekkimise viis seadme kõrvale sattunud võimsa raadiosaatja tõttu.

Tricopter ja FY-20A Version II
Hei!

Lisasin tricopteri varustusse FY-20A Version II
http://shop.fyetech.com/product_info.ph ... ucts_id=30
Põhjuse andis:
http://www.rcgroups.com/forums/showthread.php?t=1278257
ja peaks lihtsustama pildistamisel kopteri orjentatsiooni probleeme. Või probleemi, et vajub liiga ära ja alt ei saa aru mis pidi... Kas ikka on horisontaalne.
Võin julgemalt kõrgemale lasta.
Asi on mõeldud küll lennukile aga kärab ka quad ja tricopteri peal.
Tean, et nad mõtlevad juba FY-10H või Q versiooni kui aega saavad.
Ma ei jõudnud ära oodata
Minu kogemus on, et erinevus on tunda. Võin kangi põhja lükata ja lahti lasta, üle kaela ei käi, keerab tagasi. Vajab veel testimist. Eile oli esimene kord.
Ilma stabiliseerimiseta jääb tricopter viltu. Pean ise tagasi korrigeerima.
Parimat soovides,
-Ilmar-
Lisasin tricopteri varustusse FY-20A Version II
http://shop.fyetech.com/product_info.ph ... ucts_id=30
Põhjuse andis:
http://www.rcgroups.com/forums/showthread.php?t=1278257
ja peaks lihtsustama pildistamisel kopteri orjentatsiooni probleeme. Või probleemi, et vajub liiga ära ja alt ei saa aru mis pidi... Kas ikka on horisontaalne.
Võin julgemalt kõrgemale lasta.
Asi on mõeldud küll lennukile aga kärab ka quad ja tricopteri peal.
Tean, et nad mõtlevad juba FY-10H või Q versiooni kui aega saavad.
Ma ei jõudnud ära oodata
Minu kogemus on, et erinevus on tunda. Võin kangi põhja lükata ja lahti lasta, üle kaela ei käi, keerab tagasi. Vajab veel testimist. Eile oli esimene kord.
Ilma stabiliseerimiseta jääb tricopter viltu. Pean ise tagasi korrigeerima.
Parimat soovides,
-Ilmar-
Hei!
Selline on FY-20A käitumine tricopteriga:
http://www.youtube.com/watch?v=-SG6xoBpop0
Gain potekad võin põhja keerata, kõikumist ei teki.
Ehk viga selles, et DAT750 mootoritele soovitatakse 11x4.7 proppe, minul on 10x4.7
Hetkel vahetada ei saa, ei saa ka võrdlust.
Parimat soovides,
-Ilmar-
Selline on FY-20A käitumine tricopteriga:
http://www.youtube.com/watch?v=-SG6xoBpop0
Gain potekad võin põhja keerata, kõikumist ei teki.
Ehk viga selles, et DAT750 mootoritele soovitatakse 11x4.7 proppe, minul on 10x4.7
Hetkel vahetada ei saa, ei saa ka võrdlust.
Parimat soovides,
-Ilmar-
T-kujuga tricopter
Hei!
Ei pea olema Y-kujuga, võib ka olla T-kujuline tricopter:
http://www.rcgroups.com/forums/showpost ... count=5180
Lisaks veel FYETECH teeb quadi kontrollerit nagu lubatud:
http://www.rcgroups.com/forums/showpost ... tcount=307
http://www.rcgroups.com/forums/showpost ... tcount=328
Lubatakse tulevikus kõrguse ja positsiooni hoidmist ja GPSi järgi koju lendamist...
Parimat soovides,
-Ilmar-
Ei pea olema Y-kujuga, võib ka olla T-kujuline tricopter:
http://www.rcgroups.com/forums/showpost ... count=5180
Lisaks veel FYETECH teeb quadi kontrollerit nagu lubatud:
http://www.rcgroups.com/forums/showpost ... tcount=307
http://www.rcgroups.com/forums/showpost ... tcount=328
Lubatakse tulevikus kõrguse ja positsiooni hoidmist ja GPSi järgi koju lendamist...
Parimat soovides,
-Ilmar-
-
hommiku kohvi

- Posts: 399
- Joined: Thu May 28, 2009 14:14
- Location: tallinn
Re: T-kujuga tricopter
kas see T-koperdis on ilma gürodeta? mis see trükkplaat seal huvitav teeb?-Ilmar- wrote:Hei!
Ei pea olema Y-kujuga, võib ka olla T-kujuline tricopter:
http://www.rcgroups.com/forums/showpost ... count=5180

Re: T-kujuga tricopter
Kas selle T kujulisega raskuskeskmega ei teki probleeme, tundub et sellega võiks kenasti piruette õhus teha, keerutada ümber ülemise telje. Kuidagi loogikavastane ehitus tundub olevat, aga eks lendama saab kõike panna.-Ilmar- wrote:Ei pea olema Y-kujuga, võib ka olla T-kujuline tricopter:
mikrokopter hexa - fotokopter
Aerofoto - www.100jalga.ee
TimeTrap - pildiblogi
Aerofoto - www.100jalga.ee
TimeTrap - pildiblogi

Asi kipub juba päris ägedaks - http://www.youtube.com/watch?v=geqip_0Vjec ja midagi vanemat ka sealt http://www.youtube.com/watch?v=MvRTALJp8DM
Lauri Laidna - www.pistik.com
Re: T-kujuga tricopter
Gürodega ikka. Plaat on vana hea KapteinKUK'i kopteri aju. 3 güroga.hommiku kohvi wrote: kas see T-koperdis on ilma gürodeta? mis see trükkplaat seal huvitav teeb?
Muide, veidi unustatud teemal aga sain pihta, mis mu 3-kopterit enesehävitamisele kiskus. Ei olnud mobla süüdi vaid hoopis parema mootori halvasti joodetud 1 faasi juhe. Peale teist ebaõnestunud suitsiidikatset võtsin looma rajalt maha ja läks lahkamisele. Ja siis selguski...et elektroonika on teadus kontaktidest. Ja et termorüüž hoiab juhet päris hästi kinni,( isegi sikutades ei tulnud lahti) aga sellest alati ei piisa.
Seni ma arvasin, et oskan jootekolbi käes hoida...
Pole midagi paremat halvast ilmast !
-
hommiku kohvi
- Posts: 399
- Joined: Thu May 28, 2009 14:14
- Location: tallinn
kas on võimalik, et nägin eila hr. felch'i Reporteris korra vilksamisi? kahjuks ei sattunud tervet lugu nägema/kuulma. mis teema oli? videolinke?felch wrote:http://parsek.yf.ttu.ee/~felc/DSCN0243.JPG
Reporterist ei tea kuid TV3 uudiste telepurki sattusin küll. See oli tööõnnetus  Kuna Tipis on lahtiste uste päevad ja mul oli parasjagu kopter kaasas, haaras ülemus selle pihku ja tassis tudengikandidaate täis laboriruumi. Et näita veidi. Noh, eks ju võib ikka veidi hõljutada. 1 tibi hakkas uurima et kas lendab ka jne. No ikka lendab. Läksin siis oma siselennuväljale (tühi, remonti ootav praktikumi ruum) demo tegema ja kui järsku mikker nina alla torgati sain oma veast aru...
Kuna Tipis on lahtiste uste päevad ja mul oli parasjagu kopter kaasas, haaras ülemus selle pihku ja tassis tudengikandidaate täis laboriruumi. Et näita veidi. Noh, eks ju võib ikka veidi hõljutada. 1 tibi hakkas uurima et kas lendab ka jne. No ikka lendab. Läksin siis oma siselennuväljale (tühi, remonti ootav praktikumi ruum) demo tegema ja kui järsku mikker nina alla torgati sain oma veast aru...
http://www.tv3play.ee/play/235490
3. uudisteõik
EDIT: otselink allikale.
http://www.tv3play.ee/play/235490
3. uudisteõik
EDIT: otselink allikale.
Last edited by felch on Tue Oct 26, 2010 22:22, edited 2 times in total.
Pole midagi paremat halvast ilmast !
-
hommiku kohvi
- Posts: 399
- Joined: Thu May 28, 2009 14:14
- Location: tallinn
-
hommiku kohvi
- Posts: 399
- Joined: Thu May 28, 2009 14:14
- Location: tallinn
felch wrote:Muudatused:
- gürod äärest keskele kokku
- raadius väiksemaks
Kogemata sai peale ringitegemist gürode suund vale ja esimese hooga keeras masin end kohe kummuli. 1 propp läks.
ehk teadjamad seletavad, mis tähtsus on Gürode asetusel 3-kopteri kereplaadil? Ons sellel mingi täpsem loogika kuidas neid asetada või on lihtsalt katse-eksituse teema?
tean, et haaratsid, mille otstes on mootorid/propid, peavad olema 120 kraadiste vahedega. kas siis ka Gürod nii?
ebaselgeks jäi ka Gürode suund?
Hei!
Ega 3-güro asetamisel ongi vaid kaks varianti, kas 90* või siis 120*
Ma proovisin 90* varianti ja minu kopteri puhul see ei toiminud.
Tekkisid roll suunas äkilised vajumised. Kui panin 120* tagasi siis muutus kopter stabiilsemaks. RCgroups foorumis on sel teemal vaieldud.
Güro on kõige tundlikum kui ta pöörleb ümber oma telje, eks selles suunas peab seda vaatama.
Kui kopterit roll suunas kõigutada, siis tundub, et ta käitub täpselt nagu lennuk. Sellest võiks järeldada, et gürod võiksid olla 90*.
Aga 120* toimis minul kõige paremini.
Matemaatikat ei oska siin pakkuda, aga kui see telg mis propiga alla vajub
siis güro peaks olema selliselt et tal tekiks pöörlemine enda telje ümber.
PS! Mul on kolm Telebee gürot üle, kas keegi ei soovi? Pakun soodsalt.
-Ilmar-
Ega 3-güro asetamisel ongi vaid kaks varianti, kas 90* või siis 120*
Ma proovisin 90* varianti ja minu kopteri puhul see ei toiminud.
Tekkisid roll suunas äkilised vajumised. Kui panin 120* tagasi siis muutus kopter stabiilsemaks. RCgroups foorumis on sel teemal vaieldud.
Güro on kõige tundlikum kui ta pöörleb ümber oma telje, eks selles suunas peab seda vaatama.
Kui kopterit roll suunas kõigutada, siis tundub, et ta käitub täpselt nagu lennuk. Sellest võiks järeldada, et gürod võiksid olla 90*.
Aga 120* toimis minul kõige paremini.
Matemaatikat ei oska siin pakkuda, aga kui see telg mis propiga alla vajub
siis güro peaks olema selliselt et tal tekiks pöörlemine enda telje ümber.
PS! Mul on kolm Telebee gürot üle, kas keegi ei soovi? Pakun soodsalt.
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi

{kind=link}
Hei,
teooriast:
120 kraadi kohta: kui gürode teljed on mingi muu nurga all kui 90 kraadi, siis nad miksivad ka teineteise signaali enda sisse. Saaksid arvatavasti sama tulemuse, kui teeksid selle miksimise ära softis.
Kui güro pole 100% roll suunal, siis talle mõjub ka pitch. Kuna 3-kopteri iga mootor mõjutab ka pitchi, siis peab ta ka pitch teljelt signaali saama. Kuidas see siis lahendatud on on iseasi; kas toimub pitch&roll miksimine gyros või softis.
AndrusK
teooriast:
120 kraadi kohta: kui gürode teljed on mingi muu nurga all kui 90 kraadi, siis nad miksivad ka teineteise signaali enda sisse. Saaksid arvatavasti sama tulemuse, kui teeksid selle miksimise ära softis.
Kui güro pole 100% roll suunal, siis talle mõjub ka pitch. Kuna 3-kopteri iga mootor mõjutab ka pitchi, siis peab ta ka pitch teljelt signaali saama. Kuidas see siis lahendatud on on iseasi; kas toimub pitch&roll miksimine gyros või softis.
AndrusK
Hei!
See miksimine mis puldis tehakse, 120* swashplate, see on vajalik, et kopter oleks puldist juhitav. Gürode asetus kopteripeal vajalik, et gürod ise saaksid hakkama kopteri hoidmisega.
-Ilmar-
See miksimine mis puldis tehakse, 120* swashplate, see on vajalik, et kopter oleks puldist juhitav. Gürode asetus kopteripeal vajalik, et gürod ise saaksid hakkama kopteri hoidmisega.
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi
-
hommiku kohvi
- Posts: 399
- Joined: Thu May 28, 2009 14:14
- Location: tallinn
Hei!
KapteinKUKi aju lubab kasutada tavalist 4-kanaliga pulti. Ainus tingimus oli, et pult peab võimaldama kanaleid reverseerida ja "end-points" seadistada. Miksimine toimub selle KUKi ajus. Gürosid on plaadil 3tk.
Kui Sul pult võimaldab helikopterit(120* miksimine) saad juhtida ka ainult gürodega versiooni. Seljuhul 4 gürot. Vaata minu esimesi katsetusi.
-Ilmar-
KapteinKUKi aju lubab kasutada tavalist 4-kanaliga pulti. Ainus tingimus oli, et pult peab võimaldama kanaleid reverseerida ja "end-points" seadistada. Miksimine toimub selle KUKi ajus. Gürosid on plaadil 3tk.
Kui Sul pult võimaldab helikopterit(120* miksimine) saad juhtida ka ainult gürodega versiooni. Seljuhul 4 gürot. Vaata minu esimesi katsetusi.
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi
-
hommiku kohvi
- Posts: 399
- Joined: Thu May 28, 2009 14:14
- Location: tallinn
Kindlasti on DX pädev pult ! Oma 2-kopteri esialgset versiooni tüürisin Mx12-ga mis pole pooltki nii äge pill aga täiesti piisav. Kui teed 3-kopteri ilma protsessorita lihtsalt gürod ESCide ette siis Telebee gürode puhul tahtsid nad (vähemasti minu masinal) 100k takisteid sisenditest maha saada.
Throttle curve mulle sobiv väärtus oli igas punktis 22. Vähemaga ei olnud gürod nõus ja rohkem pole mõtet.
Loe ka teema alguses Ilmari toodud rc-foorumi linke.
Throttle curve mulle sobiv väärtus oli igas punktis 22. Vähemaga ei olnud gürod nõus ja rohkem pole mõtet.
Loe ka teema alguses Ilmari toodud rc-foorumi linke.
Pole midagi paremat halvast ilmast !
Laser charged multicopter flies for 12 hours. http://www.suasnews.com/2010/10/2620/as ... ew-record/
Lauri Laidna - www.pistik.com
Vapustav! Siis ikka võib saada tõeks mõte viia päikesepatareid orbiidile ja sealt energia laseriga alla Maale saata. Seda projekti ka momendil arendatakse.
Kopteri puhul ei mainita, mis akusid ta kasutab ja kui kaugelt laadimise süsteem toimib. Ja...kuikaua päikesepatareid vastu peavad sellisele ägedale kiirgusele.
Väga huvitav igatahes!
Kopteri puhul ei mainita, mis akusid ta kasutab ja kui kaugelt laadimise süsteem toimib. Ja...kuikaua päikesepatareid vastu peavad sellisele ägedale kiirgusele.
Väga huvitav igatahes!
Pole midagi paremat halvast ilmast !
Hei!
HK401B gürode asemel sobib ka KapteinKUKi plaadile Wii motion plus.
WMP kloonide hinnad $10 kanti.
http://www.rcgroups.com/forums/showpost ... count=7235
http://www.rcgroups.com/forums/showpost ... count=7247
WMP pidi olema ainult vibratsioonile rohkem tundlik...
R10 takisti 220ohmi, siis on Vref pinge õige.
Ma pole seda ise katsetanud, jäi lihtsalt silma.
-Ilmar-
HK401B gürode asemel sobib ka KapteinKUKi plaadile Wii motion plus.
WMP kloonide hinnad $10 kanti.
http://www.rcgroups.com/forums/showpost ... count=7235
http://www.rcgroups.com/forums/showpost ... count=7247
WMP pidi olema ainult vibratsioonile rohkem tundlik...
R10 takisti 220ohmi, siis on Vref pinge õige.
Ma pole seda ise katsetanud, jäi lihtsalt silma.
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi
Hei!
Hakkasin eksperimenteerima õhurõhu mõõtmist BMP085 anduriga:
Barometric Pressure Sensor - BMP085 Breakout:
http://www.sparkfun.com/commerce/produc ... ts_id=9694
Tegin sellele adapteri 5V<->3.3V
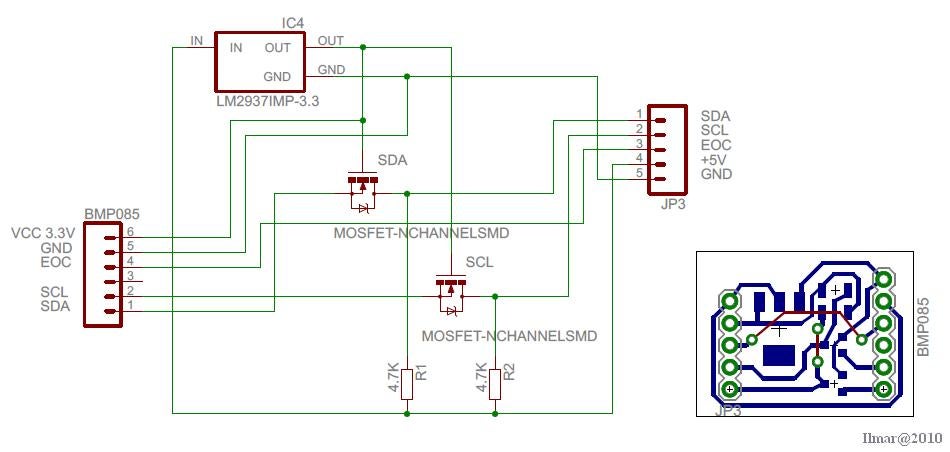

Andmed prototüübi plaadil:

Andmete lugemine rõhuandurist toimib. Throttle kanali sain ka PIC-ist läbi.
Lisaks on veel üks kanal millega saab õhurõhu etteannet muuta. Ehk kõrguse hoidmise käsk.
Idee on kasutada eraldi proset mis käib vastuvõtja ja gaasikanali(ESC) vahele.
See kontroller võiks õhurõhu muutumise järgi kõrgust hoida.
Parimat soovides,
-Ilmar-
Hakkasin eksperimenteerima õhurõhu mõõtmist BMP085 anduriga:
Barometric Pressure Sensor - BMP085 Breakout:
http://www.sparkfun.com/commerce/produc ... ts_id=9694
Tegin sellele adapteri 5V<->3.3V
Andmed prototüübi plaadil:
Andmete lugemine rõhuandurist toimib. Throttle kanali sain ka PIC-ist läbi.
Lisaks on veel üks kanal millega saab õhurõhu etteannet muuta. Ehk kõrguse hoidmise käsk.
Idee on kasutada eraldi proset mis käib vastuvõtja ja gaasikanali(ESC) vahele.
See kontroller võiks õhurõhu muutumise järgi kõrgust hoida.
Parimat soovides,
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi
Hei!
Nii esimesed katsed MultiWiiCopteriga tehtud!
Puudu on veel mootorid ja kiiruseregud
MultiWiiCopter suhtleb arvutiga ladusalt ja liigutamisel liputab ka servoga saba
WiiMotionPlus - https://www.dealextreme.com/details.dx/sku.32506
Nunchuck - https://www.dealextreme.com/details.dx/sku.24529
WiiMotionPlus - tundub ekraani järgi ilusasti toimivat.
Nunchuk - roll suunas toimib ilusasti, elevaator(PITCH) suunas nagu tõstab nina ülesse, kuigi on horisontaalne, vajab veel tähelepanu.

-Ilmar-
Nii esimesed katsed MultiWiiCopteriga tehtud!
Puudu on veel mootorid ja kiiruseregud
MultiWiiCopter suhtleb arvutiga ladusalt ja liigutamisel liputab ka servoga saba
WiiMotionPlus - https://www.dealextreme.com/details.dx/sku.32506
Nunchuck - https://www.dealextreme.com/details.dx/sku.24529
WiiMotionPlus - tundub ekraani järgi ilusasti toimivat.
Nunchuk - roll suunas toimib ilusasti, elevaator(PITCH) suunas nagu tõstab nina ülesse, kuigi on horisontaalne, vajab veel tähelepanu.
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi
Hei!
Alumine plaat on isetehtud:

Eelmisel pildil, see svammi peal sinine on WiiMotionPlus, roheline on Nunchuck, lisaks on veel plaadil Arduino Pro mini 5V/16Mhz
Progemine ja GUI käib üle USB-Serial adapteri.
PS. Nunchuck käitumine PITCH suunas läks ka normi kui on "autolevel enabled"
-Ilmar-
Alumine plaat on isetehtud:
Eelmisel pildil, see svammi peal sinine on WiiMotionPlus, roheline on Nunchuck, lisaks on veel plaadil Arduino Pro mini 5V/16Mhz
Progemine ja GUI käib üle USB-Serial adapteri.
PS. Nunchuck käitumine PITCH suunas läks ka normi kui on "autolevel enabled"
-Ilmar-
...ülevalt on ülevaade...
-Paranull- pildiblogi
-Paranull- pildiblogi