
Sekkun vestlusesse, aga ainult mootori hammasratta vahetamisega ei saa ülekannet muuta,
tuleb ka teine hammasratas vahetada. Sellise mootori asetuse korral ei saa
hammasrataste telgede vahet muuta. Oli kunagi analoogiline liikur.
Valiksin selliseks otstarbeks off-road masina. On-road masinal on liiga jäik alusvanker ning
nende suurte ratastega jääb raskuskese kõrgele. Tundub, et peab vist ka maastikul liikuma,
mitte ainult mööda vaipa?
Keevitustraat on rullis õline ja läheb pärast puhastamist praktiliselt kohe rooste.
Vasekiht on seal peal mõtteline ja ilmselt ka poorne. Vaevalt, et hästi juhib,
eriti kõrgsagedust. Valiksin hõbetatud traadi.
Varemalt, kui toimus veel piltide kodus ilmutamine,
polnud hõbetamine galvaanilisel teel kuigi keeruline.
Oli tarvis patareisid ja "Nikulai rublat" ning saigi läbitöötanud
kinnitiga lihtsama galvaniseerimise ära teha.
Hakkas silma põnev aku otste paigutus. Tundub, et majas pole lapsi.
Minu omad lükkaksid esimesel hetkel aku pistikud omavahel kokku.
4000 aku teeb vist päris toreda tulevärgi!?
Kas kaabliköidis, mis on täpselt üle GPS-antenni parabooli
veetud, signaali ei sega?
Minu esimene auto: 1:10 Dodge Viper -> UGV

Hammasratas: ei ole veel täpselt uurinud kas selline hammasratas olemas on, kuid 1-2 hammast väiksema hammasratta peaks saama panna asemele. Mootori kinnituse avad on piisavalt piklikud ning mootori ja ülekande korpuse vahel on piisavalt ruumi. Ülekandesuhe ei muutu küll eriti palju, kuid asi seegi.
Off-road vs on-road: ajab asja ära see hübriid, kes siis protol kõik asjad viimase peale paika lihvib. Kui tekib tõesti vajadus, saab amortisaatorite vedrud ära vahetada pehmemate vastu.
Keevitustraat: v-o, puudub pikema ajaline ilmastiku käes hoidmise kogemus. Elektrolüüsiga ei hakka kohe jamama, kuid võib proovida.
Aku otsad: akut ei hoita lapsele ligipääsetava kõrguse peal.
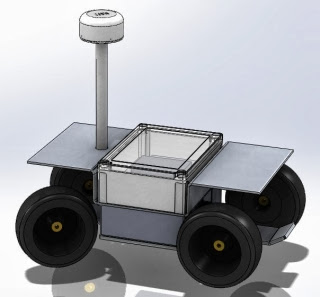
GPS: eelneval lehel on näha 3D pilti mudelist - umbes sarnaselt saab GPS antenn paigutatud, võimalikult kaugele igasugustest pindadest ja juhtidest.
Off-road vs on-road: ajab asja ära see hübriid, kes siis protol kõik asjad viimase peale paika lihvib. Kui tekib tõesti vajadus, saab amortisaatorite vedrud ära vahetada pehmemate vastu.
Keevitustraat: v-o, puudub pikema ajaline ilmastiku käes hoidmise kogemus. Elektrolüüsiga ei hakka kohe jamama, kuid võib proovida.
Aku otsad: akut ei hoita lapsele ligipääsetava kõrguse peal.
GPS: eelneval lehel on näha 3D pilti mudelist - umbes sarnaselt saab GPS antenn paigutatud, võimalikult kaugele igasugustest pindadest ja juhtidest.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne  ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
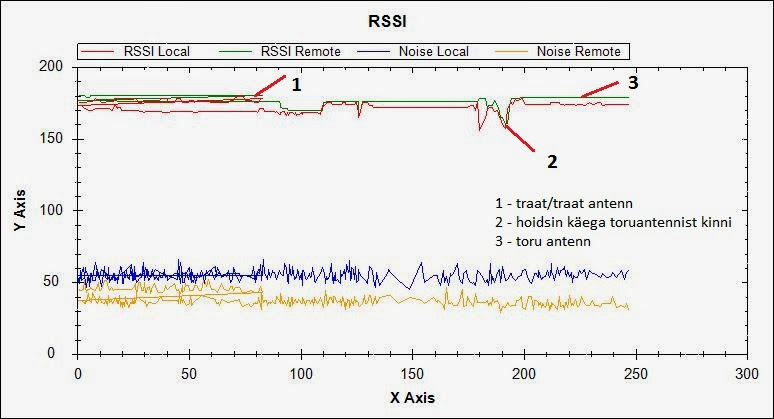
Proovisin veelkord toru antenni aretada ja voila, tulemus on suunurki üles poole kiskuv
Tegin seekord 1/4 lainepikkusega antenni. Materjaliks on 0,15mm paks peiliplekk (valge vask) keeratud torusse D16mm.
Traat/traat antenn RSSI oli 182/179
Traat/toru antenn RSSI oli 176/172
Tulemused ei ole enam nii head, kuid mitte ka väga halvad. Saan antenni mõnusalt kompaktseks ning ei ole vaja enam kahte masti liikuri peale.
*mast üks - GPS post, ~1500MHz
*mast kaks - telemeetria 433MHz antenn
Tegin seekord 1/4 lainepikkusega antenni. Materjaliks on 0,15mm paks peiliplekk (valge vask) keeratud torusse D16mm.
Traat/traat antenn RSSI oli 182/179
Traat/toru antenn RSSI oli 176/172
Tulemused ei ole enam nii head, kuid mitte ka väga halvad. Saan antenni mõnusalt kompaktseks ning ei ole vaja enam kahte masti liikuri peale.
*mast üks - GPS post, ~1500MHz
*mast kaks - telemeetria 433MHz antenn
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )

3DR radio konfiguratsiooni tööriistaga oled asja uurinud?
http://vps.oborne.me/3drradioconfig.zip
Mul on sama HK 3DR vidin. Päris 2m pealt levi ära ei kadunud, kuid komplektis olnud antennid kõlbavad heal juhul kauguse viskamiseks ning sellega ei saa ka hästi hakkama.
Panen kohe mõned pildid ka antennidest.
http://vps.oborne.me/3drradioconfig.zip
Mul on sama HK 3DR vidin. Päris 2m pealt levi ära ei kadunud, kuid komplektis olnud antennid kõlbavad heal juhul kauguse viskamiseks ning sellega ei saa ka hästi hakkama.
Panen kohe mõned pildid ka antennidest.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Traat antenn:

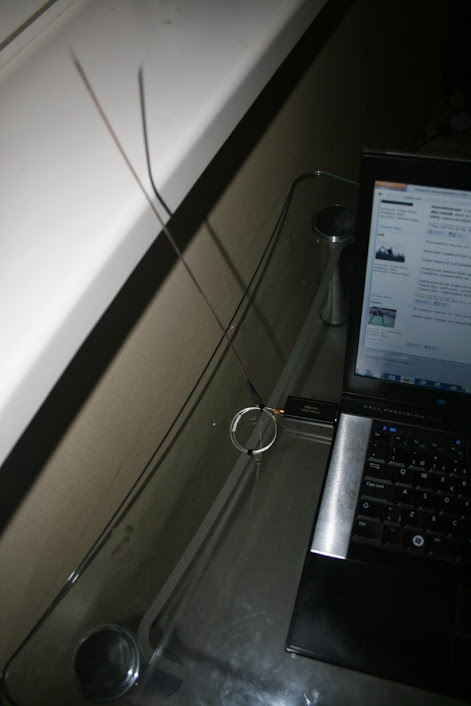

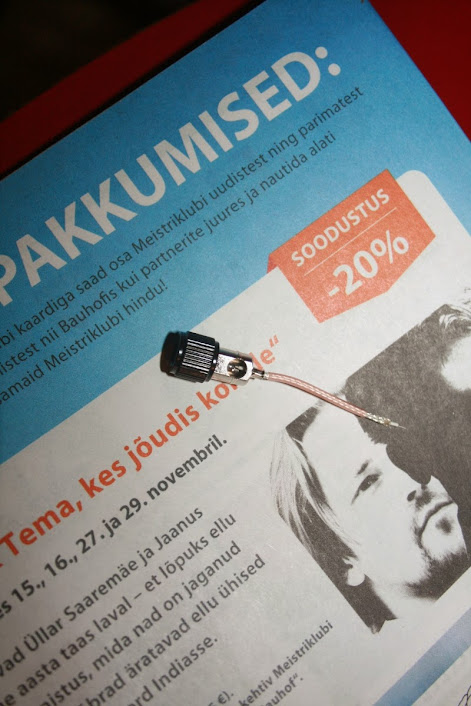
Toru antenn:

RSSI:
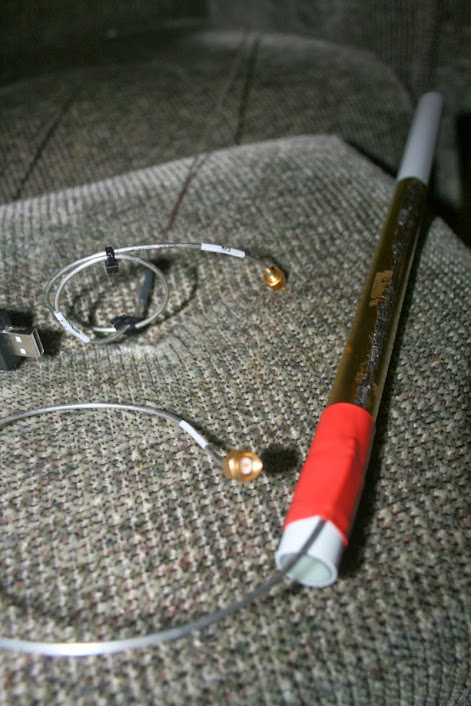
Komplektis olnud antenn lahti võetuna:
Varjestus on SMA pistiku külge kinni pressitud, keskmine soon on avatud pistiku lähedalt. NB! tegemist on lahti võetud antenniga, eemaldatud on spiraali keeratud antenni osa ning plastikust korpus.
Toru antenn:
RSSI:
Komplektis olnud antenn lahti võetuna:
Varjestus on SMA pistiku külge kinni pressitud, keskmine soon on avatud pistiku lähedalt. NB! tegemist on lahti võetud antenniga, eemaldatud on spiraali keeratud antenni osa ning plastikust korpus.
Last edited by Riff on Fri Nov 22, 2013 10:40, edited 1 time in total.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )

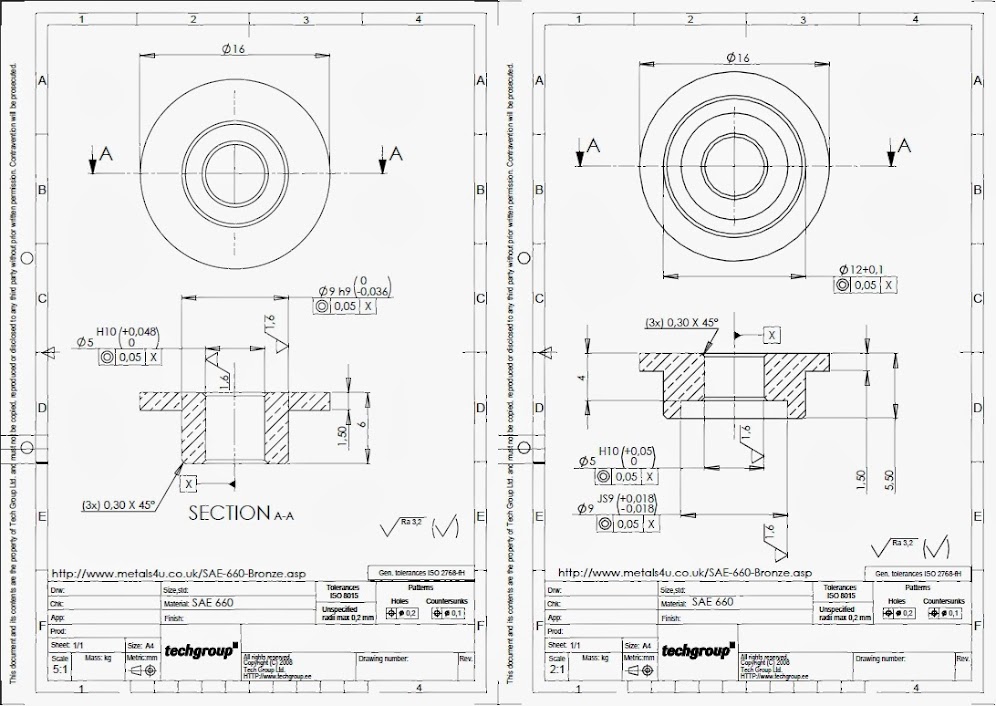
Nüüd on ka esirattad funktsionaalsed. Uute rataste ja auto telgede kinnitused ei olnud kokku sobivad. Puksid on olemas ja paigaldatud, asi töötab nii nagu peab. Kuna minu liikur ei hakka kiiresti sõitma, siis ei tekita liugelaager probleeme.
Järgmine nädal saan loodetavasti ka Fibox karbi (180x130x70mm) kätte, mille sisse panen kogu elektroonika, va: antennid, ESC ja ultraheli andurid.
Järgmine nädal saan loodetavasti ka Fibox karbi (180x130x70mm) kätte, mille sisse panen kogu elektroonika, va: antennid, ESC ja ultraheli andurid.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )

Kogu elektroonika läheb karbi sisse. Tahaks ka ESC karpi panna, kuid võib põhjustada häireid ülejäänud elektroonikale.

Last edited by Riff on Thu Dec 05, 2013 23:57, edited 1 time in total.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Vahepeal olen tegelenud andurite tarkvaraga. Ei ole kordagi varem Arduino / C keeles programmeerinud.
Sai korralikult näidiseid uuritud, koodi koostatud, kuid viimase lihvi aitas sisse viia meie enda c guru mcmatrix
Probleem seisnes ultraheli andurite ühendamises. APM võtab vastu analoog signaali 0-5V, kus 0V = signaali ei ole ning 5V = objekt on anduri vahetus läheduses.
Ultraheli andurite aeg/distants töötluse teeb ära Arduino Nano V3. Plaat jõudis vahepeal kohale juba, kuid osutus praagiks, uus pandi teele reklamatsiooni korras.
Ping paremaks töötluseks kasutan NewPing raamatukogu.
LED on indikaatori eesmärgil, et soft töötab/jookseb. Katsetamise ajal väike abimees. Softi kommentaarid on ing keeles, kuna jagasin koodi ka arduino teemalises foorumis, mis on ing keeles. Osa koodist sai jäetud eesti keeles, las õpivad ka meie keelt.
Ega siis muud ei olegi, kui jätkata ehitamisega ja koodi täiustamisega. Olen võtnud ehitamist üsna rahulikult, tulemus peab olema hea.
Sai korralikult näidiseid uuritud, koodi koostatud, kuid viimase lihvi aitas sisse viia meie enda c guru mcmatrix
Probleem seisnes ultraheli andurite ühendamises. APM võtab vastu analoog signaali 0-5V, kus 0V = signaali ei ole ning 5V = objekt on anduri vahetus läheduses.
Ultraheli andurite aeg/distants töötluse teeb ära Arduino Nano V3. Plaat jõudis vahepeal kohale juba, kuid osutus praagiks, uus pandi teele reklamatsiooni korras.
Ping paremaks töötluseks kasutan NewPing raamatukogu.
Code: Select all
/*NewPing Created by:
Tim Eckel
NewPing original code
http://code.google.com/p/arduino-new-ping/wiki/15_Sensors_Example
Code modified for analog output by:
Raimo Noormaa aka Riff from EST
mcmatrix from EST
Code output is analog signal 0-5V. There can be multiple sensors, max number untested.
PWM pinnid on: 3, 5, 6, 9, 10, 11
DI/O pinnid on: 2 kuni 13
*/
#include <NewPing.h>
#define SONAR_NUM 2 // Number or sensors.
#define MAX_DISTANCE 400 // Maximum distance (in cm) to ping.
#define PING_INTERVAL 30 // Milliseconds between sensor pings (29ms is about the min to avoid cross-sensor echo).
unsigned long pingTimer[SONAR_NUM]; // Holds the times when the next ping should happen for each sensor.
unsigned int cm[SONAR_NUM]; // Where the ping distances are stored.
uint8_t currentSensor = 0; // Keeps track of which sensor is active.
NewPing sonar[SONAR_NUM] = { // Sensor object array.
NewPing(2, 3, MAX_DISTANCE), // Each sensor's trigger pin, echo pin, and max distance to ping.
NewPing(7, 8, MAX_DISTANCE),
};
int pwmPins[SONAR_NUM] = {
// 13, 12 }; // an array of pin numbers to which pwm output is written
9, 10 }; // an array of pin numbers to which pwm output is written
int led = 13;
void setup()
{
Serial.begin(115200);
pingTimer[0] = millis() + 75; // First ping starts at 75ms, gives time for the Arduino to chill before starting.
for (uint8_t i = 1; i < SONAR_NUM; i++) {// Set the starting time for each sensor.
pingTimer[i] = pingTimer[i - 1] + PING_INTERVAL;
}
for (uint8_t i = 0; i < SONAR_NUM; i++) { // pwm output pin counter
pinMode(pwmPins[i], OUTPUT);
}
{
// initialize the digital pin as an output.
pinMode(led, OUTPUT);
}
Serial.println();
}
void loop()
{
for (uint8_t i = 0; i < SONAR_NUM; i++) { // Loop through all the sensors.
if (millis() >= pingTimer[i]) { // Is it this sensor's time to ping?
pingTimer[i] += PING_INTERVAL * SONAR_NUM; // Set next time this sensor will be pinged.
if (i == 0 && currentSensor == SONAR_NUM - 1) oneSensorCycle(); // Sensor ping cycle complete, do something with the results.
sonar[currentSensor].timer_stop(); // Make sure previous timer is canceled before starting a new ping (insurance).
currentSensor = i; // Sensor being accessed.
cm[currentSensor] = 0; // Make distance zero in case there's no ping echo for this sensor.
sonar[currentSensor].ping_timer(echoCheck); // Do the ping (processing continues, interrupt will call echoCheck to look for echo).
}
}
{
digitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(2000); // wait for a second
}
// Other code that *DOESN'T* analyze ping results can go here.
}
// If ping received, set the sensor distance to array.
void echoCheck()
{
if (sonar[currentSensor].check_timer())
cm[currentSensor] = sonar[currentSensor].ping_result / US_ROUNDTRIP_CM;
}
// Sensor ping cycle complete, do something with the results. Location option 1 for code processing
void oneSensorCycle()
{
for (uint8_t i = 0; i < SONAR_NUM; i++) {
// turn the pin on:
// http://arduino.cc/en/Reference/analogWrite
analogWrite(pwmPins[i], cm[i]);
// Serial.print(i); // print sensor number accessed
// Serial.print("="); // = märk
// Serial.print(cm[i]); // sensor distance value
// see prindib reavahetuse ka lõppu, väljund hüppab järgmisele reale
// Serial.println("cm "); // cm
// Print format i = xxx cm
}
}
Ega siis muud ei olegi, kui jätkata ehitamisega ja koodi täiustamisega. Olen võtnud ehitamist üsna rahulikult, tulemus peab olema hea.
Last edited by Riff on Sat Dec 07, 2013 15:53, edited 4 times in total.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )

Sain oma uue Arduino Micro kätte. Plaat töötab ja on korralik. Sai ka esimene jõulutulede katsetus tehtud pin 13 peal asuva LED-ga, Fading koodi kasutades.
Nano vs Micro - Microl on natuke vähem vaba mälu, vähem komponente(mis saavad rikki minna), pin 13 on ka PWM väljundiga ning odavam Nanost. Microl on rohkem IO-sid, kokku 20.
Nano vs Micro - Microl on natuke vähem vaba mälu, vähem komponente(mis saavad rikki minna), pin 13 on ka PWM väljundiga ning odavam Nanost. Microl on rohkem IO-sid, kokku 20.
Code: Select all
int ledPin = 13; // LED connected to digital pin 13
void setup() {
// nothing happens in setup
}
void loop() {
// fade in from min to max in increments of 5 points:
for(int fadeValue = 0 ; fadeValue <= 255; fadeValue +=5) {
// sets the value (range from 0 to 255):
analogWrite(ledPin, fadeValue);
// wait for 30 milliseconds to see the dimming effect
delay(20);
}
// fade out from max to min in increments of 5 points:
for(int fadeValue = 255 ; fadeValue >= 0; fadeValue -=5) {
// sets the value (range from 0 to 255):
analogWrite(ledPin, fadeValue);
// wait for 30 milliseconds to see the dimming effect
delay(10);
}
}T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Andurid sai ühendatud ning testitud. Paari anomaaliat sai ka kohatud, mõnda porti kasutades oli liiklus väga aeglane (kirjade järgi ei olnud need pordid taimieritega koormatud?!)... Tõstsin trig ja echo pinnid teiste pinnide peale ja asi läks paremaks ning töötab. Lisaks pidin output pwm kanali ära vahetama 9 pealt 11 peale, ei andnud väljundit.
Kasutusel on Arduino Micro.
Siin lühike videoklipp tuledest ja viledest:
http://youtu.be/voPvHkmMvj8
Kasutusel on Arduino Micro.
Siin lühike videoklipp tuledest ja viledest:
http://youtu.be/voPvHkmMvj8
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
*30 ms on esmase hinnangu järgi liiga lühike aeg, andurid on liialt "närvilised" mutsin 60ms peale.
*LED indikaator sai eemaldatud, ei ole vaja enam, Tx led teeb oma töö testimise ajal ära.
*Allpool on näha koodi muudetud osa
Väga huvitav on see, et Arduino Micro kood on ca 2x mahukam, kui seda oli Nano kood: 3666 baiti vs 7066 baiti.
*LED indikaator sai eemaldatud, ei ole vaja enam, Tx led teeb oma töö testimise ajal ära.
*Allpool on näha koodi muudetud osa
Code: Select all
#define SONAR_NUM 2 // Number or sensors.
#define MAX_DISTANCE 200 // Maximum distance (in cm) to ping.
#define PING_INTERVAL 60 // Milliseconds between sensor pings (29ms is about the min to avoid cross-sensor echo).
unsigned long pingTimer[SONAR_NUM]; // Holds the times when the next ping should happen for each sensor.
unsigned int cm[SONAR_NUM]; // Where the ping distances are stored.
uint8_t currentSensor = 0; // Keeps track of which sensor is active.
NewPing sonar[SONAR_NUM] = { // Sensor object array.
NewPing(5, 6, MAX_DISTANCE), // Each sensor's trigger pin, echo pin, and max distance to ping.
NewPing(8, 12, MAX_DISTANCE),
};
int pwmPins[SONAR_NUM] = {
11, 13 }; // an array of pin numbers to which pwm output is written
//int led = 13;T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Micro pwm väljundid sai ühendatud pea kontrolleriga, süsteem töötab - no, peaaegu.
On vaja pwm mapping ümber seadistada, 0V vaja vahetada 5V vastu ning 5V vahetada 0V vastu:
NÜÜD
ENNE
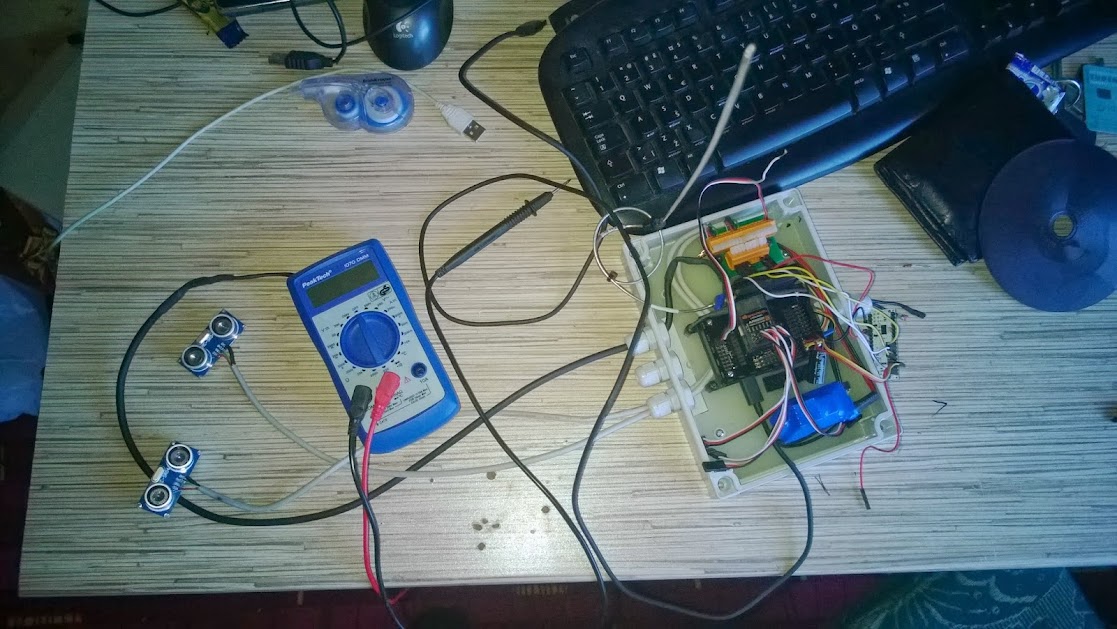
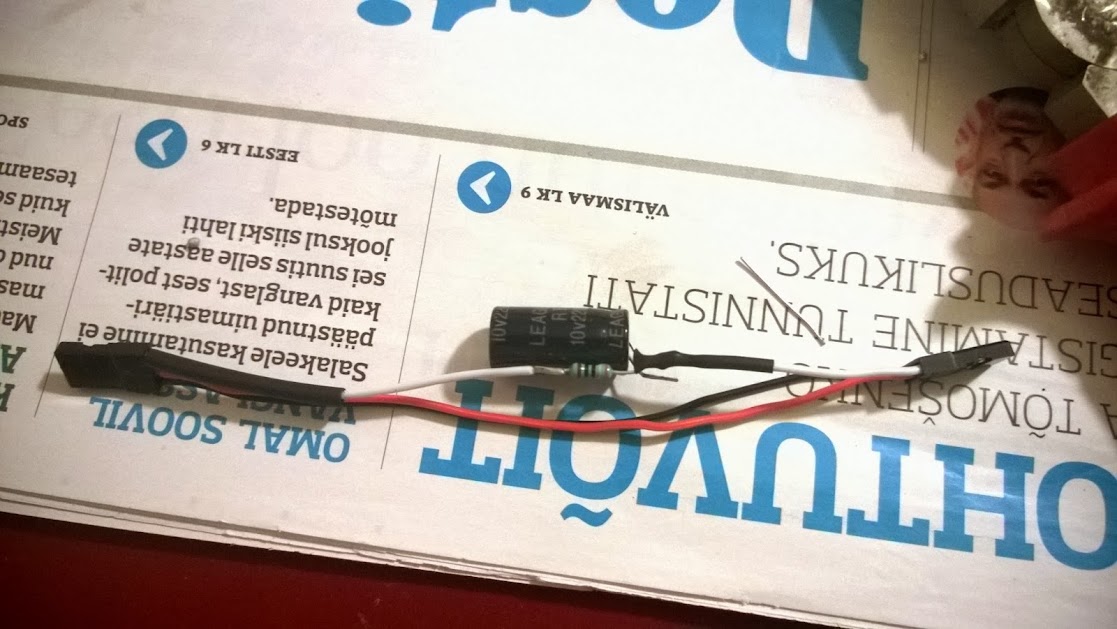
Oli vaja lisada ka väike kondensaator pwm ja "-" ahela vahele. Kasutasin katsetamisel 330uF kondensaatorit (väiksemat ei olnud üle jäänud kui 50V). Testriga mõõtes oli näha, et anduri väljund pinge oli enne hüplev.
Üks pilt ka sellest juhtmepuntrast:
On vaja pwm mapping ümber seadistada, 0V vaja vahetada 5V vastu ning 5V vahetada 0V vastu:
NÜÜD
Code: Select all
val = map(cm[i], 0, MAX_DISTANCE, 255, 0);
analogWrite(pwmPins[i], val);Code: Select all
val = map(cm[i], 0, MAX_DISTANCE, 0, 255);
analogWrite(pwmPins[i], val);Üks pilt ka sellest juhtmepuntrast:
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
330uF on liiga suure mahtuvusega, kondensaator ei jõua tühjaks laadida piisavalt palju... vaja väiksema kondensaatoriga proovida.
Üritan katsetada ka "Smoothing" koodi lisamisega - võtab x arvu keskmise ning väljastab tulemuse jooksvalt. Kiikan ka "Calibration" koodi natuke.
Üritan katsetada ka "Smoothing" koodi lisamisega - võtab x arvu keskmise ning väljastab tulemuse jooksvalt. Kiikan ka "Calibration" koodi natuke.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Koodi ei ole muutnud, kuid katsetasin veel erinevate kondensaatoritega. Sai proovitud 22uF, 330uF, 680uF ning 1500uF kondensaatoreid. Kauguse graafik stabiliseerus alles 1500uF juures.
ms - iga mõõtmise vaheline aeg
15ms 22uF
18ms 22uF
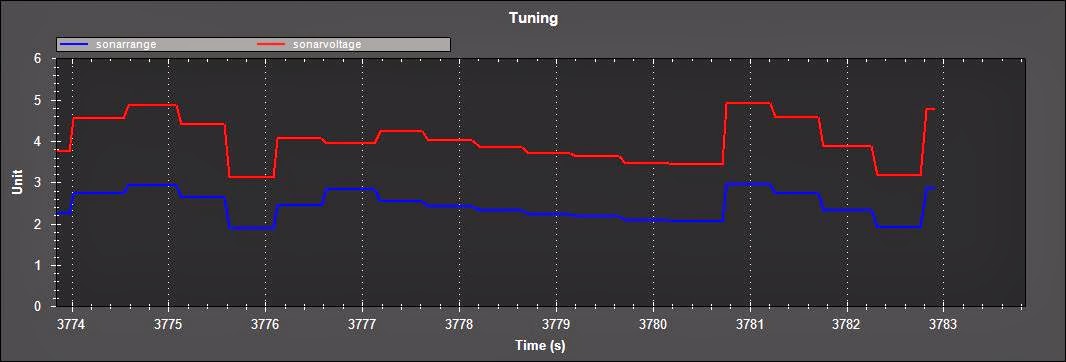
18ms 1522uF
Üritan nüüd veel ühest asjast aru saada, kas tuning graafiku uuenduse kiirus on 3-4Hz või on see ultrahelianduri väljundi tegelik sagedus. Kalku järgi peaks olema 55Hz
ms - iga mõõtmise vaheline aeg
15ms 22uF
18ms 22uF
18ms 1522uF
Üritan nüüd veel ühest asjast aru saada, kas tuning graafiku uuenduse kiirus on 3-4Hz või on see ultrahelianduri väljundi tegelik sagedus. Kalku järgi peaks olema 55Hz
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
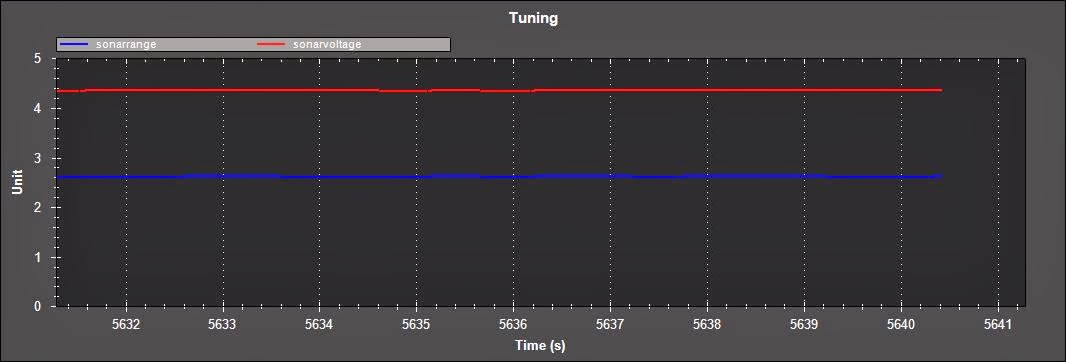
Koodi sai täiustatud ja lihtsustatud. mcmatrix pani õla alla, tänud!
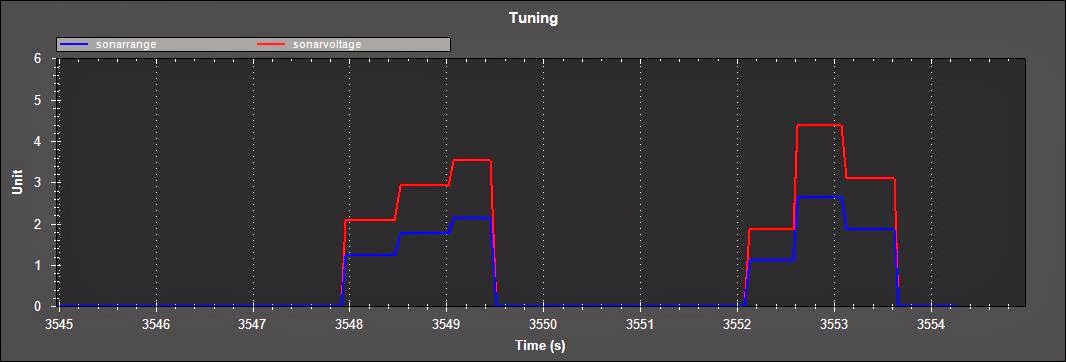
Tundub, et asi hakkab ilmet võtma. Oli vaja katsetada filtrite ja ajastustega, väljund graafik on juba ilus.
Hiljem on vaja sisse viia täpne kalibreerimine soovitud aktiveerimise mõõdu lähedal. Mõõtmise saab päris täpseks ajada, 1 cm (+- 0,5cm) ei ole enam probleem. Kui asja eriti täpseks üritada ajada, siis 5mm (+- 2,5mm)peaks ka õnnestuma, kuid see ei ole enam eesmärk.
Tundub, et asi hakkab ilmet võtma. Oli vaja katsetada filtrite ja ajastustega, väljund graafik on juba ilus.
Hiljem on vaja sisse viia täpne kalibreerimine soovitud aktiveerimise mõõdu lähedal. Mõõtmise saab päris täpseks ajada, 1 cm (+- 0,5cm) ei ole enam probleem. Kui asja eriti täpseks üritada ajada, siis 5mm (+- 2,5mm)peaks ka õnnestuma, kuid see ei ole enam eesmärk.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
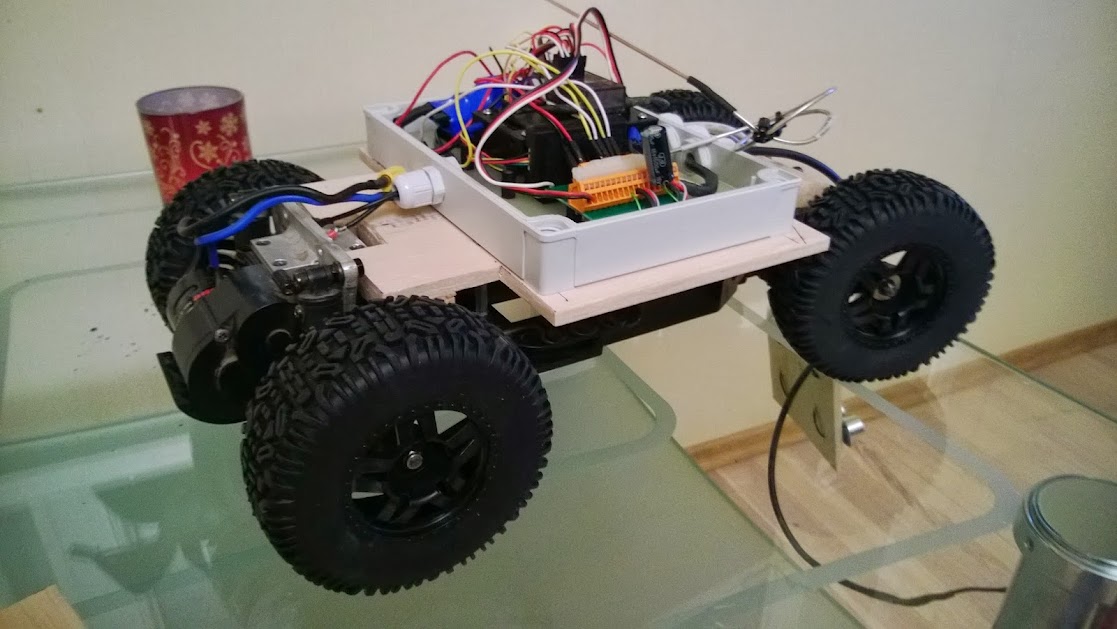
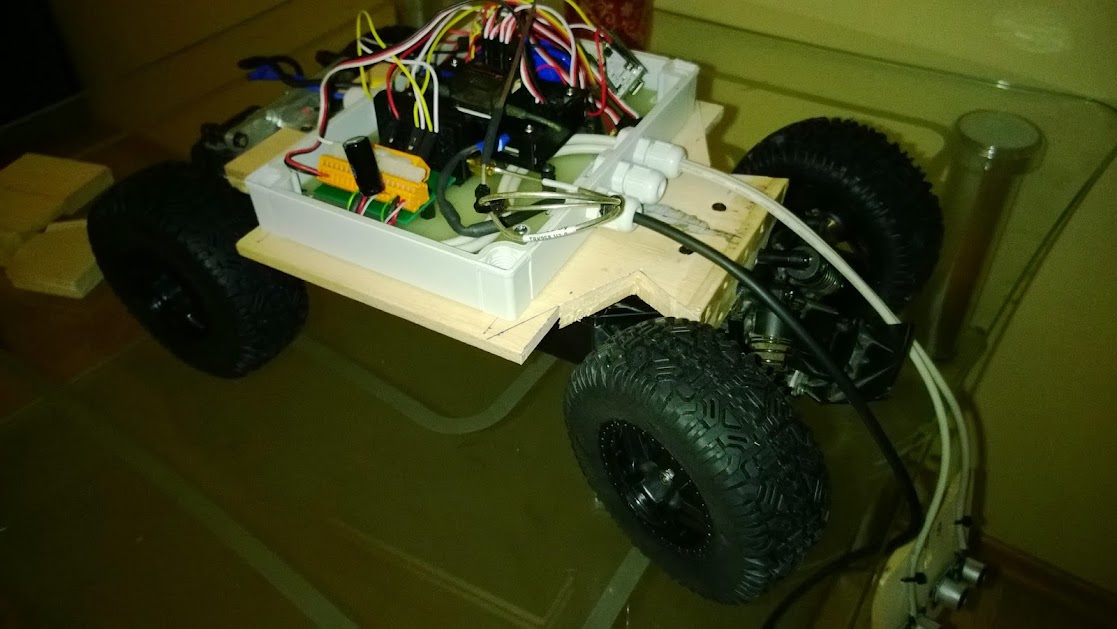
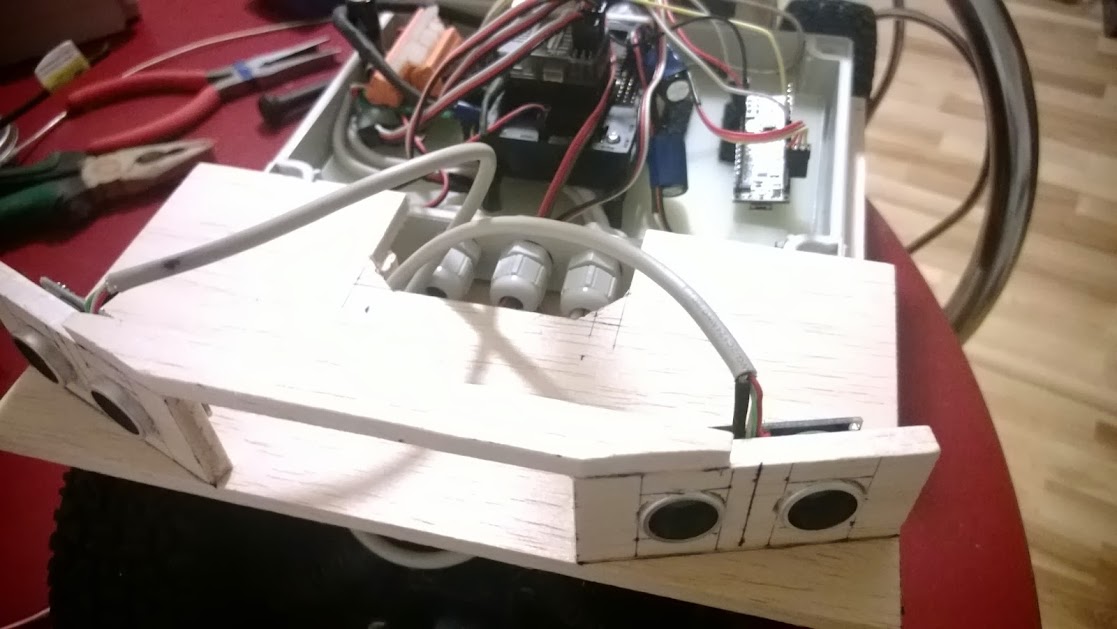
Ehitus jätkub. Elektroonika tugisüsteem tuleb balsa puidust, mille katan hiljem õhukese klaasriide kihiga. Balsat on hea lihtne töödelda ning kaalub väga vähe.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )

Last edited by Riff on Sat Aug 16, 2014 0:45, edited 1 time in total.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Head uut kõigile teema jälgijatele!
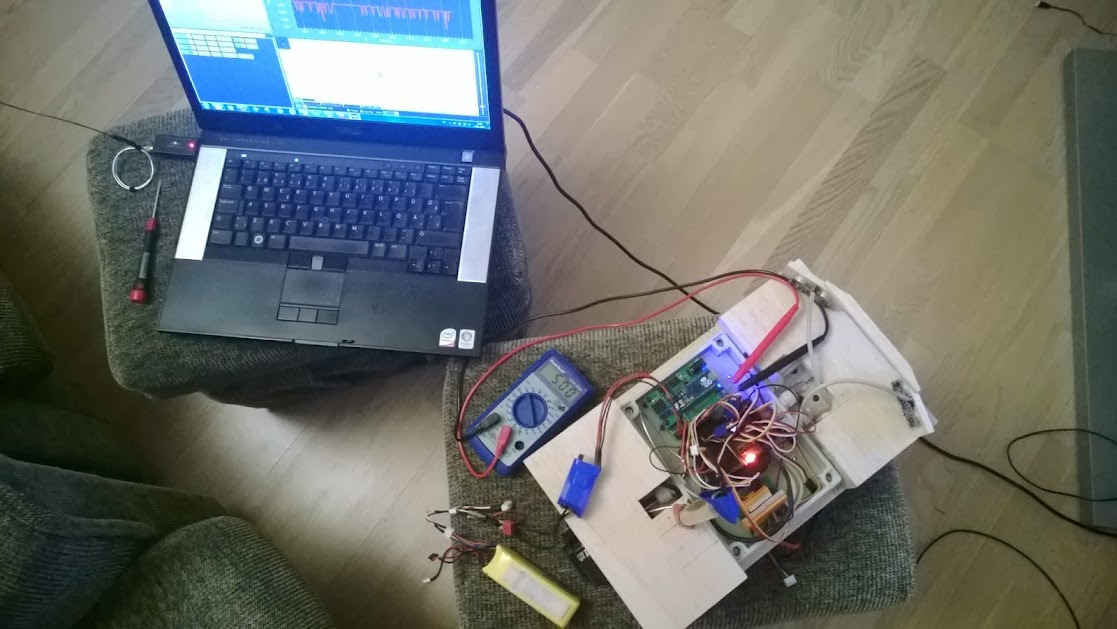
Päeval sai proovitud liikurit, kuid mitte väga edukalt. Jõusüsteem jääb lahjaks, õigemini esc ning bec. Ei suuda ära toita kõiki asju korraga: kaks kontrollerit, ultraheliandurit, gps. Mootor ja ülekanne ei ole veel probleemiks osutunud, õnneks. Vool kasvab suureks ning lülitab toite 5V ahelas välja v langeb liialt.
Teen katsetused kahe reguga paraleellselt. Tean, et sellist tüüpi jõusüsteem tekitab küsimusi, kuid usun et peaks toimima. Kasutan kahte identset 45A harjadega mootori regu, 90A kokku. Kui 50A saab tegelikkuses kätte on ka ok. Praegu kasutuses olev regu on 35A.
Päeval sai proovitud liikurit, kuid mitte väga edukalt. Jõusüsteem jääb lahjaks, õigemini esc ning bec. Ei suuda ära toita kõiki asju korraga: kaks kontrollerit, ultraheliandurit, gps. Mootor ja ülekanne ei ole veel probleemiks osutunud, õnneks. Vool kasvab suureks ning lülitab toite 5V ahelas välja v langeb liialt.
Teen katsetused kahe reguga paraleellselt. Tean, et sellist tüüpi jõusüsteem tekitab küsimusi, kuid usun et peaks toimima. Kasutan kahte identset 45A harjadega mootori regu, 90A
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
Tegin katse lisa juhtahela toitega ning asi töötab. Proovisin ka algse toitega, kuid pinge langes kiiresti suurema koormuse all (intensiivne servo liigutamine) ning süsteem lülitub välja.
Nüüd jääb üle oodata uute kontrollerite saabumine.
Nüüd jääb üle oodata uute kontrollerite saabumine.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )
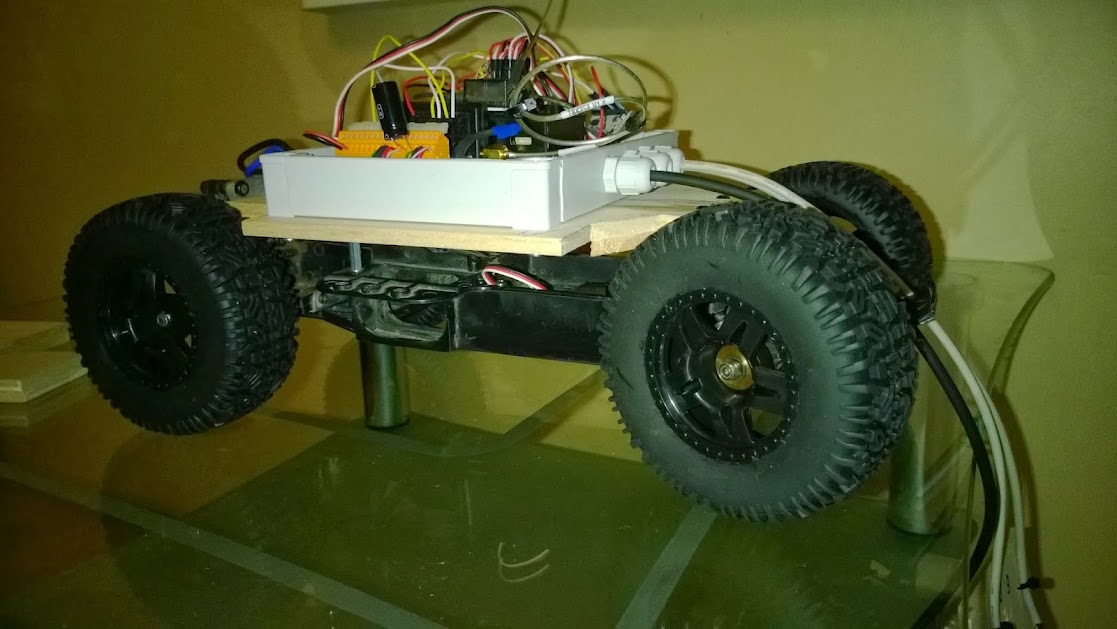
Vahepeal sai hangitud 4x4 platvorm 1:10 skaalas. Sellega peaks saama palju paremini projektiga edasi liikuda. Kontrollereid ootan siiamaani.
http://www.mudelismifoorum.eu/viewtopic.php?f=5&t=8362

50.- selle eest on minuarust täitsa ok hind.
http://www.mudelismifoorum.eu/viewtopic.php?f=5&t=8362
50.- selle eest on minuarust täitsa ok hind.
T-Rex 600 EFL DFC 3GX HV; T-Rex 600N DFC 3GX OS55 LimitedEdition HV; HK250GT - DFC 3gx savöx jne ; RF 5,5G; DX9; RoboCat 280 (Holybro F7, Tekko32, Atlata2 HV, Monster 2 jne )