...inspiratsiooniks on mul juba tükk aega, ühtede tšehhi tüüpide põrkepalli moodi droon... mille üsna täielik koopia oli kah mingil hetkel olemas, aga takerdus halva kvaliteediga mootorite taha...
...see tegelane ei ole pall, kuna peab järgmisel Robotexil võistlema ja võitma (optimist olen)... ning seetõttu ei tohi allapoole vaatava kaamera vaateväljas liigset sodi ees olla.
Hmm, tüürid... jaa, ma olen mõelnud selle peale... käes hoides gaasi andes ja tüüridega vehkides oli eelmiste tüüridega jõudu küll, aga seekordsed on pisemad.
Ise olen muretsenud selle pärast, et kas ebaühtlasel pinnal maandudes ei ole riski lõhkuda tüürid ära. Tõdesin, et risk on, seetõttu on tüüride moodul akumooduli peale libistatav ja kinnitatud... teibiga.... tüüriservod ise kah teibiga...
...ning hetkel on veel teatav konkurents terasvedrudest kõrgete jalgade ja kummipaelaga vedrustatud pikkade jalgade vahel... mõeldes tüüride toimivusele, ehk peaksin eelistama kõrgeid jalgu pikkadele....
Tüüridele hakkab ilmselt maapinna lähedal tekkiv Isand Turbulents kaikaid kodaratesse pilduma. Samas enne oma panuse tegemist tahaksin apastraati käes hoida, et kahe keskuse ( raskus ja tõste) vahet tajuda. Kui raskuskese on piisavalt madalal, siis poleks tüüre nigu vajagi tõuseb ja seisab nigu aiateivas - nujah, samas roboteksil "asjatamiseks" oleks vist ikkagi juhitavust kah vaja.
Raskuskese on tõstejõu keskmest ikka tagapool... täpsemalt, kui aparaati "külje peal" rippuda lasta, siis see on tagumise/alumise mootori pulgast umbes 1 cm tüüride suunas. Tema täpne asukoht sõltub natuke aku paigaldamisest.
Samas ei ole kõik veel kivvi raiutud - hetke käib kaitsekõrte vahetatavause teemaline uuring - et kas saaks disainida asja nii, et kõrsi ei peaks epoga kinni liimima.
Samuti otsin lahendust, kuidas maandumisjalg kaitsekõrtega nõrgalt kokku siduda. Mingi 3D prinditava jubina abil, mis esimesena ise järele annaks.
Esialgsed tulemused: jõudu jätkub ja jääb üle, maast lahti läheb, juhtida on raske... ühe korra maandus selili, kõik terve... teise korra külili, kõik terve... siis kui maandus jalgadele, läks aga katki. :P :P
Ma vist likvideerin terasvedrudega ning ratastega jalad, kasutan vedrudena söest kaitsekõrsi, ning teen veel mitu muudatust. Eesmärk: -150 g (praegu on 1150, tahaks 1000 g) ning parem kokkupõrgete talumine.
Õues ei lennanud, lendasin K-Space'is, küberi maja viiendal korrusel on sihuke koht. Nii et lund ega ametnikke ei pidanudki kartma.
Ma tahaks teie arvamuste vahepeale jääda... sellega olen 100% kursis, et raketti (atmosfääris) ei stabiliseeri mitte veojõu keskme ja raskuskeskme suhe, vaid pigem õhutakistuse keskme ja raskuskeskme oma.
Ning jaa...pikas perspektiivis kehtib see, mida snoopy kirjutas. Raskuskeskme paiknemine veojõu keskmest allpool ei taga kauakestvat stabiilsust. Kõrvalekalded liituvad teineteisega ja peagi pärast starti on käes moment, mil lendu tuleb tüürida, või mudel triivib järjest kiiremini külgsuunas ja lõpuks lendab külgsuunas.
Snoopy selgitusele vastupidise näitena tahaksin tuua aga koaksiaalkopterid. Üldistan siinkohal veidi liialt, et ülemisel rootoril on alati raske stabilisatsiooni varras, mis töötab igale kõrvalekaldele koheselt vastu. Raskuskese on veojõu keskme all. Stardil osutab veojõud tugevalt ülespoole ja raskuskeskme paiknemine all lisab stabiilsust lennu algushetkedel. Sealjuures, veojõu suund ei ole fikseeritud. "Pendli eksiarvamus" ei tohiks isegi olukorda kirjeldada, kuna ülemine rootor on oma veojõu suunalt kopteri kerest sõltumatu...
...ning seepärast on sõltumatu ülarootoriga koaksiaalid nii kuradima stabiilsed ...aga minu oma pole sõltumatu veojõu suunaga. :) Minu omale seega "pendli eksiarvamus" kehtib.
Aga, ma pean raskuskeset siiski tähtsaks. See peab olema mootorite veojõu teljel, muidu töötab nagu väljakeeratud tüür. Mootorite veojõu telg peab sealjuures ühine olema, mitte nii, et üks mootor veab veidi ühtepidi ja teine teistpidi...
...ja kuigi füüsika ja intuitsioon ei käi alati täpselt samapidi, eelistan mina ettevaatusest raskuskeset all. Põhjuseid on mitu. Kõige proosalisem on see, et lollisti maandumised on igapäevane elu, raskuskese on reeglina aku piirides, ning järsul maandumisel saab all paiknev aku mudeli kerest nii kaugele välja käia, kui teda hoidvad kummipaelad lubavad.
P.S. Stabiliseerimisest
Üldiselt, säärast masinat on parimatel päevadel võimalik hoida õhus ka ilma elektroonilise stabikata, aga see on rohkem 3D siselennukite pilootide pärusmaa. Mina nii osav pole.
Seetõttu on minu masinal elektrooniline stabilisaator (mõttetult kallis aga siiski päris osav EagleTree Guardian), mis pole päris tavaline flight control board vaid sihuke gürode ja kiirendusmõõtjatega tehishorisont sisuliselt... samas ta on veidi tõrges ja välja häälestamata.
Asjaolu, et tüürid ei pääse igal hetkel mõjule, on nüüdseks kinnitust leidnud. Tüüride pinda tuleb suurendada.
Üks omadus, mis minu masinale natuke tavadroonist rohkem stabiilsust pakub, on aga... suurem pöörleva massi osakaal. Need propellerid on nimelt parajad mõõgad. Kui nad hoo sisse on saanud, on neil teatav jõud säilitada oma pöörlemistelge. Siiski palju nõrgem, kui koaksiaalkopteri ülarootori oma... aga mitte null.
ulmeKulgur wrote:Aga, ma pean raskuskeset siiski tähtsaks. See peab olema mootorite veojõu teljel, muidu töötab nagu väljakeeratud tüür. Mootorite veojõu telg peab sealjuures ühine olema, mitte nii, et üks mootor veab veidi ühtepidi ja teine teistpidi...
Algtasakaalu jaoks on oluline, et kõikide vedavate osade tekitatav summarne veojõu vektor läbiks võimalikult täpselt massikeset. Seda võib saavutada ka tüüride trimmimisega, kuigi mõningase efektiivsuse arvelt.
Antud konstruktsiooni puhul paistab probleemiks tüüride paiknemine maapinna lähedal, seal pole õhkutõusul ja maandumise muud kui keerised.
Aga tüürid võib paigutada ka üles...
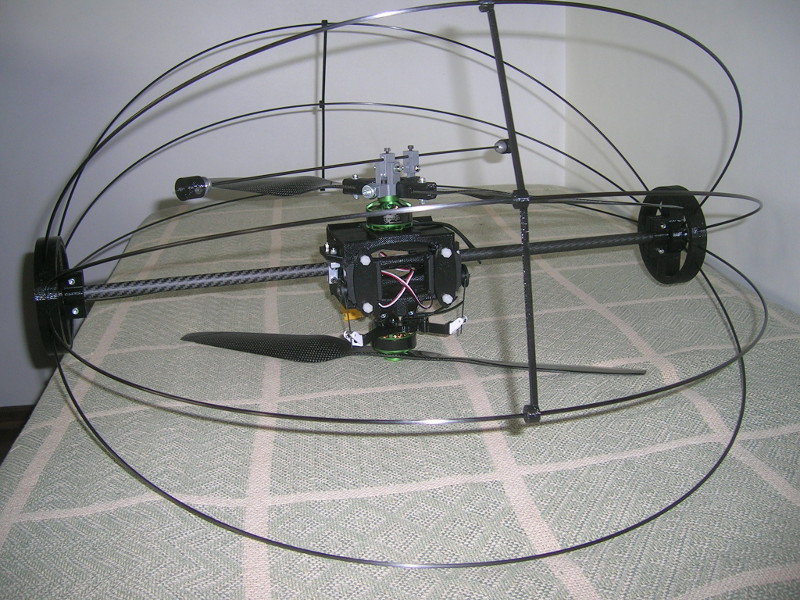
Hmm, uusim uuendus on siis külgmistele süsikõrtele kinnituvad maandumisjalad. Sedasi on väiksem tõenäosus lõhkuda maandumisel midagi, mida kotist 8 tükki asemele ei ole võtta.
Lisaks on 100 grammi õnnestunud kokku hoida, masina kaal on 1050 grammi kandis.
Aku on võtnud horisontaalse asendi ja tüüriservod liikunud aku kõrvale, samale tasapinnale. Aku pesa on otstest avatud, et akut edasi-tagasi nihutades raskuskese paika ajada.
Tüürid ise ulatuvad akust allapoole, kuna seesamune õhutakistuse kese peab raskuskeskmest tagapool olema, muidu puudub manööverdamise võime sootuks.
Paraku on hulk juppe prinditud valesti ja enne paari päeva pole mul maast lahti hüppama plaanis hakata.
Tulemus: lendab piisavalt halvasti, et ei julge lennutada. :P
Minu valduses pole ühtegi elektroonilist stabilisaatorit, mis selle masinaga normaalselt toime tuleks, ja pardaarvuti pole veel oma tööks valmis.
Nii ma siis joonistangi ülemisele mootorile stabilisaatori vardaga rootoripead. :D 3D prinditavat rootoripead, kaks kuullaagrid ja mõned kuulliigendid... eks näis mis juhtub. :D
No nüüd on vastukaalu kinnituskoht kah leitud... aga pöörlema ei saa veel panna, kuna puuduvad otsa raskused ja osad liigendite fikseerimise kruvid... kuullaagrite saldo on 6 tk hetkel. Rohkem ei lähe.
Stabika varda otsa läksid 30 grammised (!) õngetinad. Pidanuks valima kergemad, nendega isegi mootorikontroller käivitudes tõrgub kohati. Kusjuures, tina puurimine on väga tänamatu töö. Esiteks ei tohi tinase käpaga võileiba süüa, ja teiseks valdava enamuse võtetega kiilub puur tina sisse kinni. Suure õnne ja visa võitluse tulemusena õnnestus tina sees auk 2.5 milliseks ümber puurida.
Stabika varda pikkusega ei hoidnud ma kah vähimalgi määral kokku. Nii pikad, kui vähegi võimalik!
...ja tulemus on säärane, et kui mootorit keerata, siis stabika varras pöörleb rõõmsalt oma vanas tasapinnas edasi, ning hakkab ennast rootorilabadega sõtkudes pikapeale tooma uude tasapinda. Uude tasapinda jõudmiseks kulub paar sekundit. Seda tehes avaldab ta teadagi vastasmõju ära pööranud mootorile, ehk veojõu telg on mootori teljest edukalt lahti seotud. :)
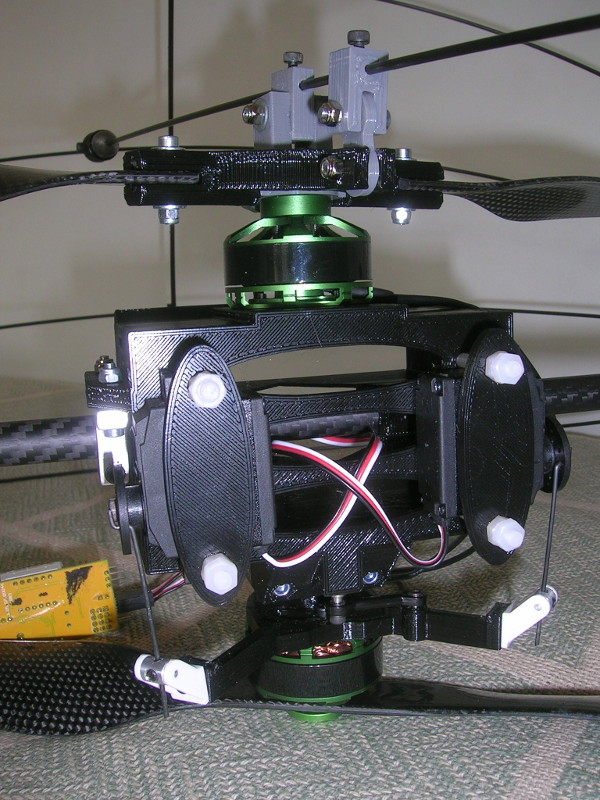
1) Jämedate süsitorude pikenemist ja arvu vähenemist (jalased läksid pildi ajaks uuesti tegemisele).
2) Alumise mootori kaldeliigendit, mis koosneb liigendlaagrist, pöörlemist ärahoidvast hoovast ning kahest kallutamise hoovast (sisuliselt kaldeautomaat, aga puudub tsüklilise kallutamise automaatika, kallutatakse tuima näoga kogu mootorit). :D Nüüd tahaks näha, kas turbulents selle juhtimisviisi vastu kah midagi suudab teha. :D