Olen siin foorumis uus ja väikese tutvustuse asemel kirjutan veidi enda kogemustest multikopteriga või nagu tänapäeval öeldakse, droonidega.
Põhimõtteliselt oli juba ammusest mõte et tahaks endale ka quadcopteri ehitada ja sellega lihtsalt lennutada, puhtalt hobina ja mitte kasumi eesmärgil. Samuti ei istu mulle ka võistlused, seega puhtalt lõbu pärast.
Esimene võimalus kopteri ehitada oli ülikoolis, kui meile anti kursusel eesmärk disainida ja kokku panna ennast isereguleeriv kopter. See oli umbes aastal 2010 või 2011. Tol ajal ei olnud kopterite ehitus ja õhku saamine nii lihtne nagu ta on tänapäeval. Kopteri saime küll enam vähem õhku, aga midagi asjalikku ta seal ei teinud - antud kopter ei olnud mõeldud puldiga juhtima, pidi olema autonoomne.
I. Alumiiniumi ajastu
Enda isikliku esimese kopteri ehitusega hakkasin pihta alles eelmise aasta talvel. Jupid tellisin valdavalt eBay'st, absoluutselt kõige odavamad asjad mis ma suutsin leida. Puldi ja vastuvõtja sain markoladu.era.ee abil. Puldiks siis FS-i6, nagu paljudel algajatel ikka (vähemalt mulle nii tundus), ehk ikka kõige odavam ja laialt levinud.
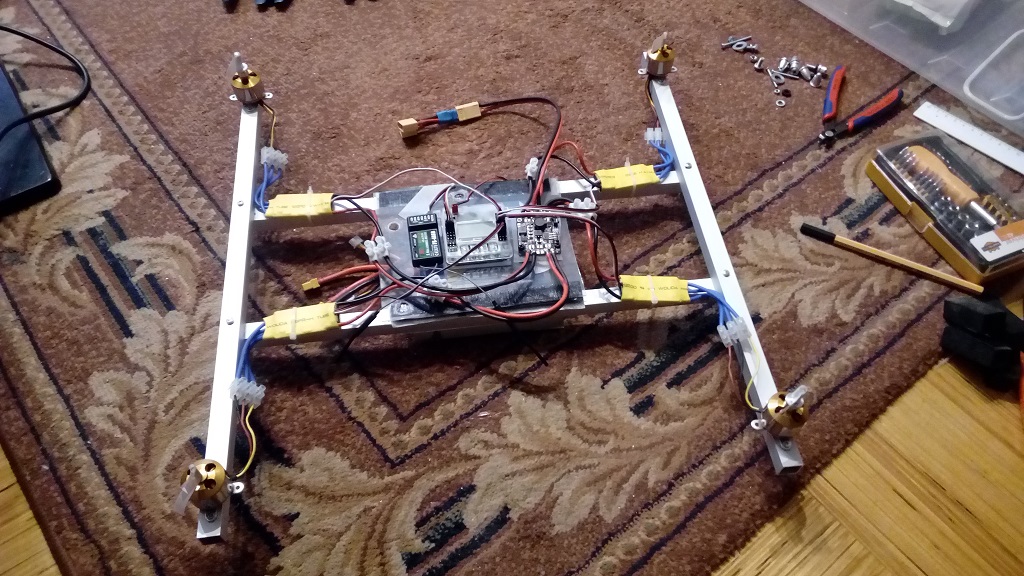
Vana ülikooli paksu pealt läksin esimesena alumiinium nelikanttoru peale. Esimene raam ja lend kukkusid välja sellised:
pilt:

Lendas. Õhku sai. Kehva oli juhtida, ilmselt vibreeris. Oli ka suurem kui ma tahtsin tegelikult. Teine versioon raamist samuti alu, seekord H konfiguratsioonis, veidi pisem:
pilt:
II. Plastiku ajajärk
Edasi oli asjaga tegelemise vastu huvi ainult suurenenud. Soetasin siis sama aasta kevadel endal 3D printeri ja siis hakkas prinditud raami arendus peale. Aluseks võtsin midagi thingiverse'ist ja hakkasin sellele sarnaselt midagi leiutama. Peale mõnda iteratsiooni oli tulemus midagi sellist:
video: https://drive.google.com/open?id=1g5sAV ... mHwLP_7dnt
Siin kasutasin juba paremat pulti, Devo 8s, mille sain kingiks laevmudelismiga tegelevalt tuttavalt. Aju oli Naze32 (Cleanflight) ja OSD sain minimOSD ühe variandiga. Kokku kaalus asi ca 1,2 kg. Seda arendasin ja lennutasin eelmise aasta suve vältel. Sai lennatud vaid Angle/Stabilize ehk ise ennast horisontaalselt lendavas režiimis. See 3d prinditud raam oli siis ka esimene, millel oli FPV võimekus. Prillid EV800. Kopterile paigaldatud ka HD kaamera.
video ühest meeldejäävamast videost: https://www.youtube.com/watch?v=3pZWH4iOBXY
video ühest võrdlemisi kõrgelt kukkumisest: https://drive.google.com/open?id=1K5aUP ... 5EAGSgvADV
Kaotasin videopildi ära (odav hiina videosaatja, mis maksis kätte) ja otsustasin lasta tal lihtsalt kukkuda, et ta kaugemale ei lendaks. Iseloomustab selle raami eripära. Raam sai prinditud küll PLA'st ,aga läbi haarade jooksis süsinikkiust? (loe: telgikaar, see mis kaasaegsele telgile kuju annab) toru. Keset raami said torud kokku ja moodustus rist. Seda raami ma ei suutnudki tema viimases iteratsioonis ära lõhkuda (endiselt terve). Eelmistel iteratsioonidel ikka printisin aegajalt uusi haarasid.
Selle raamiga lendasin veel alles selle aasta juunis.
III. Lähiminevik - miniquad
Selle aasta hooaja algus oli siis ikka jälle harjutamine enda 10" propelleritega kollase PLA'st prinditud kopteriga. Suvel hakul aga olid juba mõtted väiksemate ja rohkem paindlikemate olevuste peal. Kes meist siis pole näinud youtube'ist igasugu vigureid, mis tehakse 5" miniquad'idega "Just seda tahan mina ka" , on see mõte mis peas käis. Tegevus oli juba üsna selge, 3d prinditud raam, millel on alumiinium või süsnikkiust torudega tugevdatud haarad. Uueteks juppideks jällegi kõige odavam hiinakas mis leidus. Mingi (emax?) tuntud firma koopia odav 2300 kV mootor, mis sobib 5" proppidele. Samuti knock off Littlebee mootorikontrollerid, 30A. Kaamerad ja muud jutud kõik samuti kõige odavam - välja arvatud videosaatja (jah ma õppisin vähemalt selles enda vigadest), selleks sai Eachine VTX03 (eelmine saatja oli 600 mW ja see oli 200 mW, maha keeratud 50 mW peale ja üllatus üllatus levi oli mitu korda parem).
pilt:

Selle raamiga lennutasin esimest korda Acro/Rate ehk manuaalses režiimis. St kopter ise ennast horisontaalsena ei hoia. Küll aga hoiab kopter etteantud nurka, või vähemalt püüab hoida. Õppisin ära ja sooritasin oma esimesed roll ja flip manöövrid (ma ei tea eestikeelsed terminoloogiat).
Selle raamiga kopteri suutsin ka tiiki lennutada. Hüppasin järgi, tõstsin välja, kuivatasin üleöö pliidi peal ära ja hommikul lennutasin edasi. Isegi aku elab veel täitsa. Haarasid olen pidanud printima suve jooksul oma tosina jagu. Jõudsin järeldusele et plastik ikkagi põhimaterjalina ei sobi, kui on soov freestyle lennutada. Pea iga teine kukkumine oli haara vahetus.
Video ühest lennust selle kopteriga: https://drive.google.com/open?id=1YJgoT ... GBnDA9Th6U
IV. Kaasaeg - süsiniku ajastu
Kuna mul oli tunne et lennuoskused on piisavalt paranenud, otsustasin siis lõpuks niivõrd kuivõrd päris tooteid või vähemalt kvaliteetsemaid asju soetada. Enamuse õppimisvead ja kukkumised peaks olema tehtud - edasi ainult harjutamine ja nautimine. Nüüd kopteri õhkutõusu ajal värisevad käed ainult selle pärast, et külm on. Lennu ajal adrenaliinirohkem momendid välja jättes.
Minu praegune setup, pandud kokku siis suve lõpupoole:
Mootorid Emax RS2205 2300kV, kontrollerid HAKRC 35A Dshot1200
Aju Omnibus F4 V3, kaamera HS1177, videosaatja Aomway TX003
Saatja/pult: Walkera Devo 8s, vastuvõtja: Walkera RX-Sbus.
Raam: Martian II 220 mm (teatavasti Alieni kloon)
pilt:

videod:
https://www.youtube.com/watch?v=FG8TWDQeywE (üks esimesi kordi 4S aku)
https://drive.google.com/open?id=1UZC40 ... -Y565VWDoE
Selle isendi võimekust iseloomustav klipp split-S manöövrist (video on tehtud sel nädalavahetusel): https://drive.google.com/open?id=11NTV4 ... ZGqE72TsZU
TLDR: Miks ma seda kõike kirjutan? Jagan oma väga lühiajalist kogemust kopteritega ja loodan, et minu pildid ja videod innustavad ka teisi FPV koptereid/droone proovima.